بازوهای رباتیک رباتیس
بازوهای صنعتی و آموزشی OpenManipulator
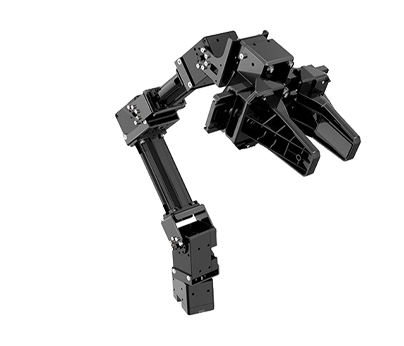
۹ ويژگی بازوی رباتیک Open Manipulator-P:
۱- بازوی چندمنظوره و ارزان قيمت
۲- بازوی ۶ درجه آزادی بر پايهی سرو موتورهای Dynamixel Pro
۳- ساختار ماژولار با خاصیت سرويس و نگهداری آسان
۴- حمل و نقل آسان به علت وزن کم
۵- دارای Payload مناسب با عملياتهای کوچک و متوسط
۶- محدوده دسترسی وسيع
۷- مناسب برای عملیات تکرارشونده و دقیق
۸- واسط USB و ارتباط RS485
۹- دارای SDK برای برنامه نویسی کاربر (دارای مثالهای سینماتیک مستقیم، معکوس و ...)

۹ ويژگی بازوی رباتیک Open Manipulator-X:
۱- بازوی آموزشی و ارزان قيمت
۲- بازوی ۶ درجه آزادی بر پايهی سرو موتورهای سری X
۳- ساختار ماژولار با قابلیت اتصال به TurtleBot
۴- حمل و نقل آسان به علت وزن کم
۵- دارای Payload مناسب برای عملياتهای تحقیقاتی و آموزشی
۶- محدوده دسترسی وسيع
۷- مناسب برای آموزش و تحقیقات
۸- واسط USB و ارتباط TTL
۹- دارای SDK برای برنامه نویسی کاربر (دارای مثالهای سینماتیک مستقیم، معکوس و ...)