سروموتورهای هوشمند داینامیکسل
پیشروبات نماینده انحصاری ROBOTIS در ایران
سروموتورهای هوشمند داینامیکسل
پیشروبات نماینده انحصاری ROBOTIS در ایران
سروو موتور داینامیکسل چیست؟
DYNAMIXEL What is
سروو موتورهای هوشمند داینامیکسل ساخت کمپانی ROBOTIS کره جنوبی هستند که با تمرکز ویژهای بر توسعه دانش رباتیک و پیادهسازی پروژههای پژوهشی، صنعتی و حضور در مسابقات رباتیک و رویدادهای علمی طراحی و توسعه داده شدهاند.
این نوع سرو موتور هوشمند به لطف حسگرهای گوناگون و همچنین پروتکل ارتباطی اختصاصی، ضمن دریافت دستورات حرکتی از کنترلر اصلی، میتواند بازخوردهای مختلفی نظیر موقعیت، سرعت، نیرو، گشتاور، دمای داخلی موتور و… را به کنترلر ارسال کند.
اکثر سروو موتورهای داینامیکسل با استفاده از موتورهای دی سی شرکت مکسون موتور سوئیس (Maxon) ساخته شدهاند که علاوه بر کوچک بودن طول عمر بالایی نیز دارند. از دیگر قابلیتهای موتورهای مکسون موتور میتوان به قابلیت گردش ۳۶۰ درجه در هر دو حالت DC موتور و سروو موتور اشاره کرد.
سروو موتورهای داینامیکسل در بسیاری از مسابقات و لیگهای رباتیک مثل لیگ رباتهای فوتبالیست انساننما و رباتهای امدادگر توسط اکثر تیمها مورد استفاده قرار میگیرند. همچنین این سروو موتورهای هوشمند در پروژههای علمی و پژوهشی مانند ساخت ربات انساننمای سورنا مورد استفاده قرار گرفتهاند و به خاطر ویژگیهای خاصشان بسیار محبوب هستند.
چرا سروو موتورهای داینامیکسل؟
?Dynamixel
Why
فیدبک
اطلاعات موقعیت موتور از نظر الکتریکی و مکانیکی در ساخت رباتهای پیشرفته بسیار مهماند که به کمک سرو موتورهای داینامیکسل این اطلاعات بدون نیاز به ماژولهای دیگر در دسترس است.
راهاندازی آسان
قابلیت All-in-one این سروموتورهای هوشمند، به شما اجازه میدهد تا ربات خود را تنها با اتصال کابل برق و سیمهای ارتباطی راه اندازی کنید.
بدون نیاز به درایور
هنگام استفاده از سروو موتورهای صنعتی نیاز به درایور به صورت جداگانه دارید اما در سرو موتورهای صنعتی و غیر صنعتی داینامیکسل نیازی به استفاده از درایور جدا نخواهید داشت.
مستندات فنی کامل
شرکت ROBOTIS مشخصات فنی دقیقی را به صورت مستند برای سرووموتورهای داینامیکسل ارائه کرده که در مقالات علمی در جهان مورد تایید است.
شیوههای اتصالات گوناگون
در این سروو موتورها اتصالات به گونهای طراحی شده است که در موقعیتهای مکانیکی مختلف، بسیار منعطف باشد.
کیت توسعه نرمافزاری
سرو موتورهای داینامیکسل دارای کیتهای توسعهی نرم افزاری (SDK) هستند به همین خاطر استفاده از زبانهای برنامهنویسی بر بستر سیستمهای مختلف به راحتی امکان پذیر است.
اتصال زنجیرهای
قابلیت اتصال الکتریکی و دادهای به صورت زنجیرهای باعث شده بتوانیم تا ۲۵۳ موتور را به صورت شبکه و تنها با سه رشته سیم به هم متصل کرده و کنترل کنیم.
تنوع در انتخاب
شرکت رباتیس طیف گستردهای از سروموتورهای DYNAMIXEL مانند سروو موتورهای ضد آب و یا سروو موتورهای صنعتی را برای رفع نیازهای مختلف شما ارائه کرده است.
رباتهای قدرت گرفته از سروموتورهای هوشمند داینامیکسل

TurtleBot3 Burger

نسل جدید رباتهای متحرک با ویژگیهای ماژولار بودن، دارای 2 عدد سروموتور هوشمند داینامیکسل XL430
Robotis Thormang

پلتفرم ربات انساننما با قد حدودی یک متر و چهل سانت، دارای سرووموتورهای سری PRO داینامیکسل


OpenManipulator-X

یک بازوی رباتیک پژوهشی پیشرفته به صورت سخت افزار/متن باز، دارای 5 عدد سروموتور هوشمند داینامیکسل XM430-W350-T
فهرست مطالب
انواع سروموتورهای داینامیکسل
Classic PRO X Series DYNAMIXEL
DYNAMIXEL Classic
سرو موتور هوشمند داینامیکسل سری کلاسیک
میراث داینامیکسل، مناسب برای پژوهشهای صنعتی و نیمهصنعتی، سابقه استفاده در پلتفرمهای انساننما
DYNAMIXEL Classic

DYNAMIXEL X-Series
سرو موتور هوشمند داینامیکسل سری ایکس
دارای ۶ سری مختلف برای کاربردهای مختلف، قدرت و دقت بالا، بهرهگیری از الگوریتمهای کنترلی بهروز و کامل
DYNAMIXEL X-Series

DYNAMIXEL PRO
سرو موتور هوشمند داینامیکسل سری صنعتی
سری صنعتی، توان بالا، برخورداری از گیربکس کاهنده جدید و ماژولار بودن به طور کاملمناسب برای رباتهای انساننمای سایز بزرگ و بازوهای رباتیک صنعتی/نیمه صنعتی
DYNAMIXEL PRO

Dynamixel Classic

میراث داینامیکسل، مناسب برای پژوهش های صنعتی و نیمه صنعتی، سابقه استفاده در پلتفرمهای انساننما(ROBOTIS_OP2 / ROBOTIS_PREMIUM)
Dynamixel X-Series
دارای ۶ سری مختلف برای کاربردهای مختلف، قدرت و دقت بالا، بهرهگیری از الگوریتمهای کنترلی به روز و کامل
Dynamixel PRO
سری صنعتی، توان بالا، برخورداری از گیربکس کاهنده جدید و ماژولار بودن به طور کامل مناسب برای رباتهای انساننمای سایز بزرگ و بازوهای رباتیک صنعتی/نیمه صنعتی
مقایسه سرووموتورهای داینامیکسل سری PRO و X
| سری PRO | سری X |
| دقت بالا | منعطف |
| گیربکس سیکلوئیدی | ماژولار |
| با دوام، مناسب صنعت | مقرون به صرفه |
| دارای درگاه دسترسی به I/O برای ماژولهای مختلف | طراحی فشرده و کوچک |
ربات OP2 با موتورهای MX-28

ربات Max E1 با موتورهای 2XL430-W250-T
مقایسه سرووموتورهای داینامیکسل سری PRO و X
| سری PRO | سری X |
| دقت بالا | منعطف |
| گیربکس سیکلوئیدی | ماژولار |
| با دوام، مناسب صنعت | مقرون به صرفه |
| دارای درگاه دسترسی به I/O برای ماژولهای مختلف | طراحی فشرده و کوچک |
Dynamixel Controller
کنترلرهای مخصوص داینامیکسل
Dynamixel DYD
گیربکس سیکلوئیدی داینامیکسل
DYNAMIXEL Controller
کنترلرهای مخصوص داینامیکسل
DYNAMIXEL DYD
گیربکس سیکلوئیدی داینامیکسل
نحوه انتخاب Dynamixel
برای انتخاب بهتر سروموتورهای هوشمند داینامیکسل موردنظر خود، میتوانید از این ویدئو کمک بگیرید تا توضیحاتی درباره گراف NT، ولتاژ کاری، نسبت چرخدنده و پروتکل سریال به دست آورید.
برای انتحاب سروموتور متناسب با پروژهی دلخواه خود میتوانید در ادامه این صفحه، سری داینامیکسل مورد نظرتان را انتخاب کنید و از طریق لینک Robotis eManual که به شکل اختصاصی برای هر موتور قرار داده شده است، به صفحه راهنمای کمپانی رباتیس بروید.
نرمافزارهای مرتبط با Dynamixel
۱- آیا برای کار با سروو موتورهای هوشمند داینامیکسل به نرم افزار اختصاصی نیاز داریم؟
برای کار با سرووموتورهای داینامیکسل نرمافزارهای “R+ Manager” و “R+ Task” توسط ROBOTIS ارائه شده و به راحتی قابل دانلودند و استفاده از آنها رایگان میباشد.
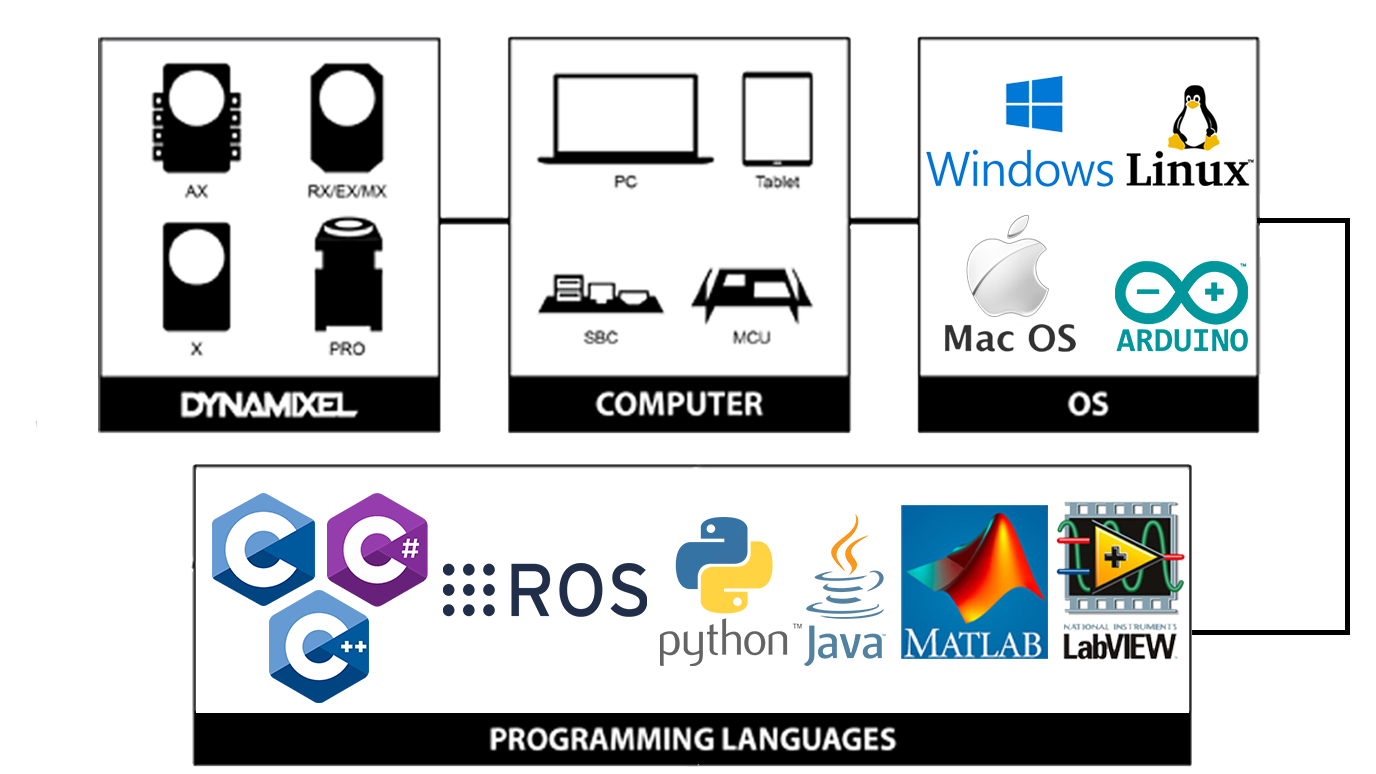
۲- چه سیستمعاملها و سختافزارهایی از نرم افزارهای R+ Manager و R+ Task پشتیبانی میکنند؟
داینامیکسل برای سیستمعاملهای ویندوز (Windows)، لینوکس (Linux)، مک (Mac)، قابلیتهای مختلفی مانند SDKها، سورسکدها و کتابخانههای گوناگون را برروی سخت افزارهای مختلف مثل لپ تاپ، گوشی و … ارائه کرده است.
۳- با کدام یک از زبانهای برنامهنویسی میتوان سروو موتورهای داینامیکسل را راهاندازی کرد؟
سروموتورهای داینامیکسل از زبانهای برنامهنویسی مختلفی مثل: سی (C)، سیپلاسپلاس (++C)، سیشارپ (#C)، متلب (MATLAB)، جاوا (JAVA)، پایتون (Python)، لبویو (LABVIEW)، راس (ROS یا سیستمعامل رباتها) و … پشتیبانی میکند.
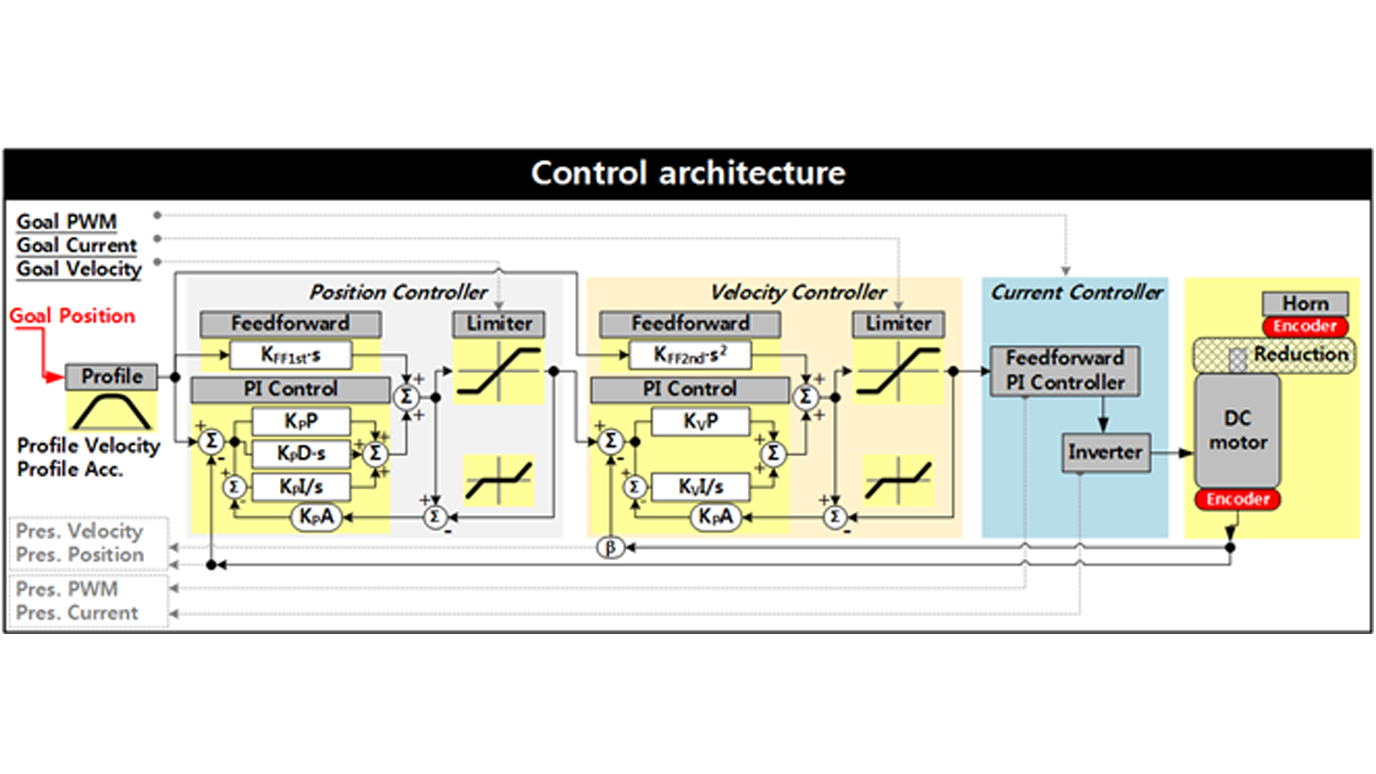
۱- کدام پارامترهای سروموتورهای داینامیکسل را میتوان کنترل کرد؟
پارامترهایی نظیر کنترل موقعیت، کنترل سرعت، کنترل جریان (گشتاور)، کنترل PWM و … را میتوان در سروموتورهای داینامیکسل کنترل کرد.
۲- سروموتورهای داینامیکسل چه فیدبکهایی ارسال میکنند؟
Feedback لحظهای از موقعیت، سرعت، جریان (گشتاور/بار)، دما، ولتاژ، وضعیت سختافزار و موارد دیگر سروو موتور از طریق سیستمعامل DYNAMIXEL در دسترس است.
۳- آیا سروموتورهای داینامیکسل دارای PID هستند؟
بلی. وجود PID در سروموتورهای Dynamixel باعث شده است تا شما بتوانید با تنظیم دقیق PID، کنترل کاملی بر موقعیت و سرعت سروموتور خود داشته باشید.
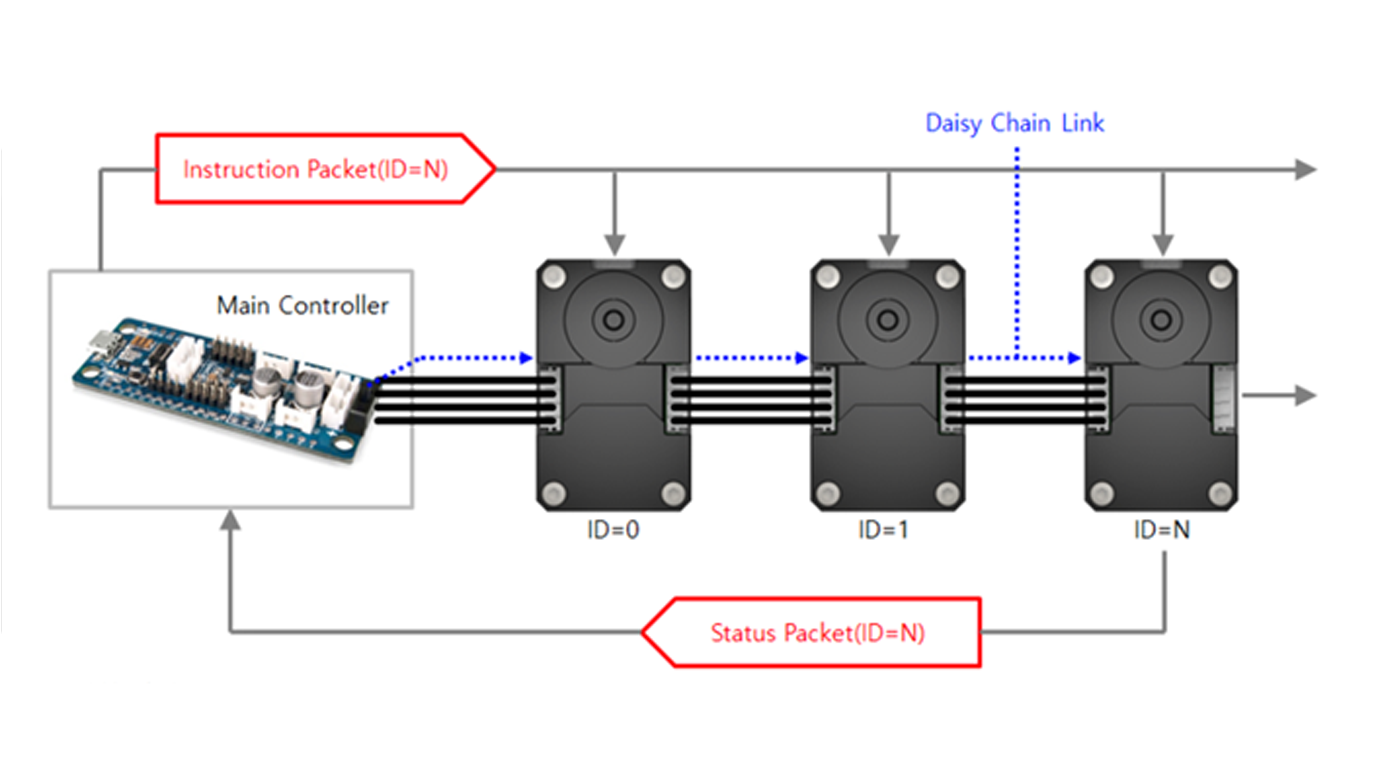
۱- چگونه میتوان سروموتورهای DYNAMIXEL را کنترل کرد؟
کنترل هر سروموتور DYNAMIXEL، تنها از طریق ارسال Data packets از یک گذرگاه ارتباطی مشترک صورت میگیرد.
۲- ارتباط میان سرووموتورهای داینامیکسل با یکدیگر به چه صورت میباشد؟
۳- سروموتورهای داینامیکسل از چه پروتکلهای ارتباطی پشتیبانی میکنند؟
پشتیبانی از پروتکلهای ارتباطی RS-485 و TTL (نیمه دوبلکس/ناهمزمان) یکی از مهمترین ویژگیهای سرووموتورهای داینامیکسل میباشد.
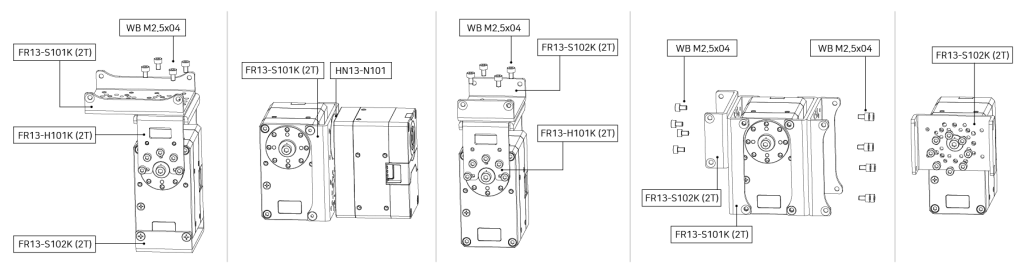
۱- آیا سروموتورهای داینامیکسل دارای Bracket یا Frame خاصی هستند که بتوان با آنها ربات یا بخشی از ربات را ساخت؟
بلی. ساخت ربات یا بخشی از ربات با انتخاب از میان براکت یا قابهای اختیاری مخصوص سروموتورهای داینامیکسلها امکانپذیر میباشد.
۲- آیا دسترسی به فایلهای CAD قطعات مکانیکی سروموتورهای داینامیکسل امکانپذیر میباشد؟
بلی. دسترسی به دادههای مکانیکی CAD به صورت آنلاین برای طراحی قطعات سفارشی و رباتها با مراجعه به صفحه مخصوص هر محصول امکانپذیر میباشد.
سادهترین و سریعترین راه برای شروع کار با سروموتورهای DYNAMIXEL چیست؟


برای دریافت مشاوره رایگان درباره سروموتورهای داینامیکسل، لطفا با شماره ۸۸۶۵۴۲۹۹-۰۲۱ تماس حاصل نمایید.
سوالات متداول
| نام سری | جنس بدنه | جنس چرخدنده | ویژگیهای دیگر |
|---|---|---|---|
| XL | پلاستیک مهندسی | پلاستیک | – |
| XC | پلاستیک مهندسی | فلزی | – |
| XM | آلومینیومی | فلزی | – |
| XH | آلومینیومی | فلزی | دارای موتور Maxon بدون هسته با کیفیت بالا |
| XD | آلومینیومی | فلزی ارتقا یافته، برای دوام و طول عمر بیشتر | دارای موتور Maxon بدون هسته با کیفیت بالا |
| XW | آلومینیومی، مهر و موم شده | فلزی | ضدآب(IP68)، دارای موتور Maxon بدون هسته با کیفیت بالا |
253 عدد، اما ROBOTIS (کمپانی تولیدکننده) توصیه میکند که برای هر زنجیره 5 سروموتور داینامیکسل متصل به هم، از یک منبع تغذیه جداگانه استفاده کنید.
کنترل PID، روشی برای تنظیم حرکت محرک (Actuator) بر اساس بازخورد از نوع حلقه بسته است و سیستم مجهز به آن، میتواند برای رسیدن به پاسخ خاص و با دقت مناسب تنظیم گردد. سروموتور DYNAMIXEL دارای یک کنترلر PID یکپارچه است که امکان تنظیم مشخصات حرکتی با دقت مطلوب را برای کاربران فراهم میکند.
اکثر سرووموتورهای DYNAMIXEL با پروتکل های ارتباطی استاندارد RC سازگاری ندارند، اما سری XL330 از پشتیبانی آزمایشی محدودی برای ارتباطات RC SBUS و IBUS برخوردار است.
کمپانی ROBOTIS، کنترلرهایی را تولید میکند که ویژه DYNAMIXEL طراحی شدهاند. کنترلکننده OpenRB-150 محصولی جدید گزینهای عالی برای شروع کار با داینامیکسل است. سروموتورهای DYNAMIXEL، همچنین با کنترلرهای آردوینو، Weigl show و کنترلرهای ربات Arbotix و Synthiam برای کاربران حرفهای کاملاً سازگار است. سروموتورهای Dynamixel را می توان با هر دستگاهی که قادر به برقراری ارتباط از طریق ارتباط سریال TTL یا RS485 باشد، کنترل کرد.
داینامیکسلها، موتورهای پلهای نیستند. آنها نوع خاصی از سروو هستند که به عنوان “سروو هوشمند” شناخته می شوند که دارای توانایی نظارت بر تبادل داده و عملکرد، کنترل و ارتباط با اجزای داخلی یا خارجی سروو موتور می باشد. این تواناییها سروو موتورهای داینامیکسل را نسبت به دیگر سرووهای استاندارد منحصربهفرد مینماید.
DYNAMIXEL را میتوان در پروژههایی با استفاده از سرووهای استاندارد یا موتورهای پلهای گنجاند، اما روشهای کنترل داینامیکسلها با بقیه سروموتورها متفاوت است، بنابراین ممکن است برای ادغام هر دو در یک طرح واحد، به سخت افزار مجزایی نیاز داشته باشید.
سروموتورهای DYNAMIXEL، دارای سنسور گشتاور یکپارچه نیستند اما میتوانند گشتاور خروجی فعلی خود را با استفاده از جریان خود تشخیص دهند.
وجود حالتهای کنترل مبتنی بر جریان در سروموتورهای DYNAMIXEL، کنترل گشتاور و عملکرد را امکانپذیر میکند.
بله، اما برای جلوگیری از آسیب به سروموتورها، باید کابل برق مربوطه را از کابل اتصال اصلی قطع کرده و از دو منبع تغذیه جداگانه استفاده کنید.
برای اتصال DYNAMIXELها در یک زنجیره کلی، باید نسخه پروتکل ارتباطی آنها یکسان باشد. این بدان معنی است که سرووهای سری AX نمیتوانند به سرووهای سری X متصل شوند. اما ممکن است سرووهای سری MX و X پس از ارتقاء سیستم عامل به پروتکل نسخه 2.0، با یکدیگر ارتباط برقرار کنند. علاوه بر این، سروموتورهای داینامیکسل سری MX، دارای کانکتورهای متفاوت از سری X میباشد، بنابراین به یک کابل مبدل نیاز دارید.
سروموتورهای DYNAMIXEL دارای کنترل PID داخلی است. اگر از کنترل PID خارجی استفاده میکنید باید سروو موتور داینامیکسل را در حالت PWM قرار دهید.
کمپانی ROBOTIS، سروموتورهای داینامیکسل سری XW را با درجه حفاظتی IP68، برای استفاده در محیطهای مرطوب و حتی زیر آب ارائه داده است.
سروموتورهای DYNAMIXEL با استفاده از پروتکلهای استاندارد RC کنترل نمیشوند، بلکه از پروتکل ارتباطی سفارشی خود استفاده میکنند. در بیشتر اوقات، برای تغییر سرووهای سرگرمی استاندارد به سروموتورهای DYNAMIXEL، نیاز به تغییر در سختافزار خود دارید.
سروموتورهای داینامیکسل، دارای امکانات بی نظیری مثل کنترل موقعیت داخلی، بازخورد دقیق، کنترل PID و انواع حالتهای عملیاتی هستند که همراه با دقت بالا، تجربهای بی نظیر برای شما فراهم میکند.
در بستهبندیهای سرووموتورهای داینامیکسل بر اساس نوع و سری خریداری شده، ممکن است لوازم مختلفی مثل: کابل و هورن خروجی مخصوص وجود داشته باشد.
فریمها و دیگر قطعاتجانبی را باید به صورت جداگانه خریداری کنید.
هر سروموتور داینامیکسل صنعتی(پرو) دارای یک کابل 4 پین برای ارتباط و تغذیه میباشد. سری داینامیکسل پرو علاوه بر داشتن این کابل، دارای یک کابل اضافهی دو پین برای جلوگیری از افت ولتاژ در هنگام اتصال زنجیرهای این سری از سروو موتورهای داینامیکسل میباشد. کمپانی ROBOTIS اسفاده همزمان از دو کابل برای اطمینان بیشتر توصیه میکند.
اگر میخواهید کابلهای DYNAMIXEL را خودتان از ابتدا بسازید، اطلاعات مربوط به کانکتور، سیم و نحوه اتصال برای هر محصول در بخش «اطلاعات رابط» در صفحه eManual آن محصول موجود است.
کوچکترین سرووموتور DYNAMIXEL، سری 330 و بزرگترین سرووموتور داینامیکسل PH54-200-S500-R در سری صنعتی و در سری X، بزرگترین داینامیکسل سری 540 است.
DYD یک کاهنده Cycloidal خارجی است. درست مانند آنچه در سروموتورهای صنعتی سری PRO داینامیکسل موجود است. DYD را می توان بر روی هر موتور الکتریکی از جمله DYNAMIXEL نصب کرد.
مقایسه سرووموتورهای داینامیکسل سری PRO و X
مقایسه سرووموتورهای داینامیکسل سری PRO و X
| سری PRO | سری X |
| دقت بالا | منعطف |
| گیربکس سیکلوئیدی | ماژولار |
| با دوام، مناسب صنعت | مقرون به صرفه |
| دارای درگاه دسترسی به I/O برای ماژولهای مختلف | طراحی فشرده و کوچک |
حالتهای کنترلی داینامیکسل
حالتهای کنترلی سروموتور داینامیکسل شامل: Position Mode، Extended Position Mode، Velocity Mode، Current Mode، Current Based Position Mode، PWM Mode میشوند که در این ویدئو توضیحات موردلازم برای درک درست این حالتهای کنترلی داده شده است.
مروری بر ارتباطات داینامیکسل - RS485 در برابر TTL
هنگام استفاده از سروموتورهای DYNAMIXEL، به دو عامل باید توجه کنید:
۱- پروتکل فیزیکی / الکتریکی. ۲- پروتکل ارتباطی / دادهای.
RS485 و TTL پروتکلهای فیزیکی/الکتریکی هستند.اما پروتکلهای ارتباطی / دادهای شامل “پروتکل 1.0” و “پروتکل 2.0” میشود که توسط نسل های مختلف سروموتورهای DYNAMIXEL استفاده می شوند.
در این ویدئو به لایه فیزیکی، ارتباط TTL، نحوه کارکرد، ارتباط RS485، استانداردهای ارتباطی، قابلیتهای پروتکل اشاره میشود.