سرو موتور هوشمند DYNAMIXEL سری X
پیشروبات نماینده انحصاری ROBOTIS در ایران
عملگرهای رباتیک DYNAMIXEL X، سری جدید از سروموتورهای هوشمند و محبوب داینامیکسل محصول شرکت رباتیس میباشد.
این عملگرهای شبکهای به علت برخورداری از قدرت و دقت بالا و بهرهگیری از الگوریتمهای کنترلی به روز و کامل، در انجام بسیاری از پروژههای رباتیک و ساخت ربات های مختلف نظیر رباتهای چند مفصلی، رباتهای انسان نما، بازوهای رباتیک و ... کاربرد فراوان دارند.
از خواص برجسته سروموتور DC داینامیکسل این است که میتوان آن را هم به کمک انواع کنترلرهای مبتنی بر میکروکنترلر و هم توسط رایانه از طریق برنامه ها و محیطهای برنامه نویسی مختلف نظیر MATLAB، Python، ROS، Java، Labview، Visual Studio و ... کنترل نمود.
این عملگرهای شبکهای به علت برخورداری از قدرت و دقت بالا و بهرهگیری از الگوریتمهای کنترلی به روز و کامل، در انجام بسیاری از پروژههای رباتیک و ساخت ربات های مختلف نظیر رباتهای چند مفصلی، رباتهای انسان نما، بازوهای رباتیک و ... کاربرد فراوان دارند.
از خواص برجسته سروموتور DC داینامیکسل این است که میتوان آن را هم به کمک انواع کنترلرهای مبتنی بر میکروکنترلر و هم توسط رایانه از طریق برنامه ها و محیطهای برنامه نویسی مختلف نظیر MATLAB، Python، ROS، Java، Labview، Visual Studio و ... کنترل نمود.

ويژگیهای Dynamixel X
بهبود گشتاور
بدنه جمع و جور
افزایش دوام و قابلیت توسعه
قابلیت اتصال سیم از پشت بدنه برای کاهش استرس سیم
اتصال مستقیم پیچ به بدنه بدون مهره
بهبود دفع حرارت با استفاده از بدنه آلومینیومی
دارای 6 حالت کنترل
کنترل گشتاور بر مبنای جریان (4096 پله، 2.69ma برای هر پله)
برنامهریزی حرکت هموار به کمک پروفایل کنترل
دسترسی به اطلاعات تراجکتوری و وضعیت حرکت
کم مصرف (کاهش جریان از 100 به 40 میلیآمپر)
بدنه جمع و جور
افزایش دوام و قابلیت توسعه
قابلیت اتصال سیم از پشت بدنه برای کاهش استرس سیم
اتصال مستقیم پیچ به بدنه بدون مهره
بهبود دفع حرارت با استفاده از بدنه آلومینیومی
دارای 6 حالت کنترل
کنترل گشتاور بر مبنای جریان (4096 پله، 2.69ma برای هر پله)
برنامهریزی حرکت هموار به کمک پروفایل کنترل
دسترسی به اطلاعات تراجکتوری و وضعیت حرکت
کم مصرف (کاهش جریان از 100 به 40 میلیآمپر)



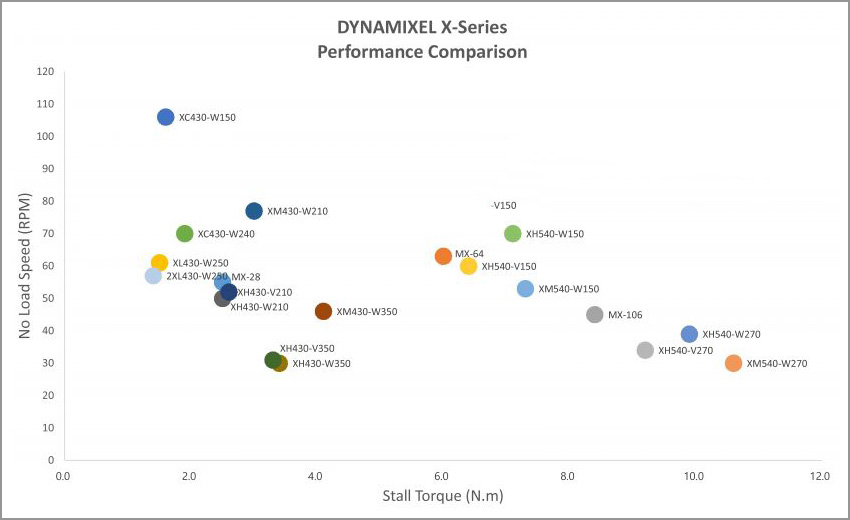
نمودار مقایسهای داینامیکسل
جدول سازگاری برخی کنترلرها با انواع داینامیکسل

انواع داینامیکسل
سروموتور Dynamixel XH430-W210

ابعاد: 34 x 46.5 x 28.5 میلیمتر
وزن: 82 گرم
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
نسبت گیربکس: 212.6:1
گشتاور Stall: برابر 2.3N.m در ولتاژ 12، جریان 1.3A
سرعت بیباری: 50 دور در دقیقه
موتور: نوع Coreless ساخت Maxon Motor
محدوده حرکت : 360 درجه
رزولوشن: 4096 پالس در هر دور
نحوه ارتباط: TTL/RS-485

سروموتور Dynamixel XH430-W350
ابعاد: 34 x 46.5 x 28.5 میلیمتر
وزن: 82 گرم
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
نسبت گیربکس: 353.5:1
گشتاور Stall: برابر 3.4N.m در ولتاژ 12، جریان 1.3A
سرعت بیباری: 30 دور در دقیقه
موتور: نوع Coreless ساخت Maxon Motor
محدوده حرکت : 360 درجه
رزولوشن: 4096 پالس در هر دور
نحوه ارتباط: TTL/RS-485

سروموتور Dynamixel XM430-W210
ابعاد: 34 x 46.5 x 28.5 میلیمتر
وزن: 82 گرم
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
نسبت گیربکس: 212.6:1
گشتاور Stall: برابر 3.0N.m در ولتاژ 12، جریان 2.3A
سرعت بیباری: 77 دور در دقیقه
موتور: نوع Coreless
محدوده حرکت : 360 درجه
رزولوشن: 4096 پالس در هر دور
نحوه ارتباط: TTL/RS-485

سروموتور Dynamixel XM430-W350
ابعاد: 34 x 46.5 x 28.5 میلیمتر
وزن: 82 گرم
ولتاژ: 10 الی 14.8 ولت (توصیه 12V)
نسبت گیربکس: 353.5:1
گشتاور Stall: برابر 4.1N.m در ولتاژ 12، جریان 2.3A
سرعت بیباری: 46 دور در دقیقه
موتور: نوع Coreless
محدوده حرکت : 360 درجه
رزولوشن: 4096 پالس در هر دور
نحوه ارتباط: TTL/RS-485

سروموتور Dynamixel XL-320
موتور داخلی: Cored Motor
وزن: 16.7 گرم
ابعاد: 24mm x 36mm x 27mm
نسبت گیربکس: 1/238
گشتاور stall: برابر 3.97kgf.cm در ولتاژ 7.4
سرعت بیباری: 114 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 6 الی 8.4 ولت (توصیه 7.4V)
وزن: 16.7 گرم
ابعاد: 24mm x 36mm x 27mm
نسبت گیربکس: 1/238
گشتاور stall: برابر 3.97kgf.cm در ولتاژ 7.4
سرعت بیباری: 114 دور در دقیقه
دقت: °0.29
میزان حرکت: صفر تا °300 و یا به صورت Endless
ولتاژ: 6 الی 8.4 ولت (توصیه 7.4V)

محدوده دما: 5- الی 70 درجه سانتیگراد
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 253 کد از 0 تا 252
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
سیگنال فرمان: packetهای دیجیتال
پروتکل: ارتباط سریال به صورت Half duplex Asynchronous
لایه فیزیکی: TTL Level Multi Drop
کد شناسایی: 253 کد از 0 تا 252
سرعت ارتباط: 7343bps الی 1Mbps
فیدبک: مکان، دما، بار، ولتاژ ورودی و غیره
جنس: پلاستیک خاص
توجه: سروموتور XL-320 سروموتوری کوچک و در عین حال ارزان قیمت در میان سروموتورهای Dynamixel میباشد.