ROBOTIS OP: Advanced ROS based Humanoid Robot
PishRobot is Exclusive distributor of ROBOTIS Products in Iran.

ROBOTIS OP robot series are affordable, miniature-humanoid-robot platforms with advanced computational power, sophisticated sensors, high payload capacity and dynamic motion ability to enable many exciting research, education and outreach activities.
"ROBOTIS OP3" is a new version of "ROBOTIS OP2" and "ROBOTIS OP" that was formerly known as “DARwln-OP". ROBOTIS OP3 is a ROS based humanoid platform ideal for SLAM, HRI, Machine Learning, Machine Vision and Artificial Intelligence projects.
"ROBOTIS OP3" is a new version of "ROBOTIS OP2" and "ROBOTIS OP" that was formerly known as “DARwln-OP". ROBOTIS OP3 is a ROS based humanoid platform ideal for SLAM, HRI, Machine Learning, Machine Vision and Artificial Intelligence projects.

High Performance and Advanced Features
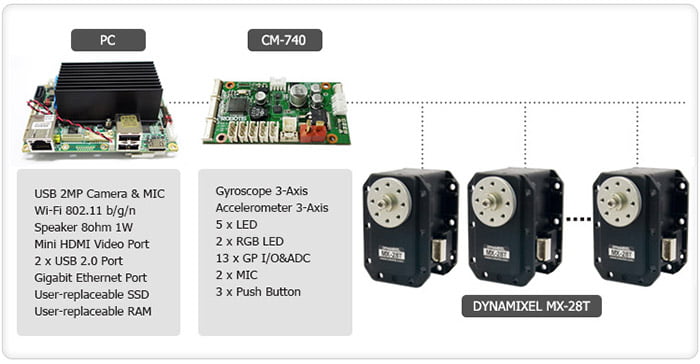
ROBOTIS OP2
- Default walking speed: 24.0 cm/sec (9.44 in/sec) 0.25 sec/step - user modifiable gait 0.25 sec/step - user modifiable gait
- Default standing up time from ground: 2.8 sec (from facing down) and 3.9 sec (from facing up) - user modifiable speed (from facing down) and 3.9 sec (from facing up) - user modifiable speed
- Built-in PC: Intel Atom N2600 @1.6 GHz dual core, RAM 4GB DDR3, 32GB mSATA
(For up-to-date information Check http://sourceforge.net/projects/darwinop) - Management controller (CM-740): ARM CortexM3 STM32F103RE 72MHz
- 20 actuator modules (6 DOF leg x2+ 3 DOF ann x2 + 2 DOF neck)
- Actuators with durable metallic gears (DYNAMIXEL MX-28T)
- Self-maintenance kit (easy to follow steps and instructions)
- Standby mode for low power consumption
- 1Mbps high-speed Dynamixel bus for joint control
- 1800mAh LIPO Battery (30 minutes of operations), charger, and external power adapter
(Battery can be removed from robot without shutting down by plugging in external power before removal) - Versatile functionality (can accept legacy, current, and future peripherals)
- 3-axis gyro, 3-axis accelerometer, button x3, detection microphone x2
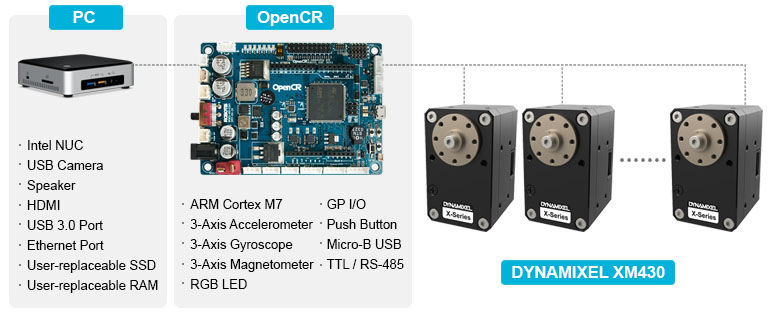
ROBOTIS OP3
- Built-in PC: Intel NUC with an Intel Core i3 processor, RAM 8GB DDR4, 128GB M.2 SSD
- Management controller (OpenCR): ARM Cortex-M7
- 20 actuator modules (6 DOF leg x2+ 3 DOF arm x2 + 2 DOF neck)
- Actuators with durable metallic case & gears (DYNAMIXEL XM430)
- Self-maintenance kit (easy to follow steps and instructions)
- Standby mode for low power consumption
- 4.5Mbps high-speed Dynamixel bus for joint control
- 1800mAh LIPO Battery (30 minutes of operations), charger, and external power adapter
(Battery can be removed from robot without shutting down by plugging in external power before removal) - Versatile functionality (can accept legacy, current, and future peripherals)
- 3-axis gyroscope, 3-axis accelerometer, 3-Axis magnetometer, button x4, microphone x2, speaker x1
Simple and Clean Architecture
ROBOTIS OP2
ROBOTIS OP3
Open Platform (Hardware and Software)
- Mechanics Information
(Dimensions, Kinematics, Dynamics, CAD data) - Electronics Information
(Controllers, Sub B/Ds, Schematics, Part Information) - Software Information
(Development Environment, Framework, Source Code) - Management Information
(Detailed Assembly Diagrams, User Manintenance Guide) - Community Resources
(User-developed Code, Various Application Examples)
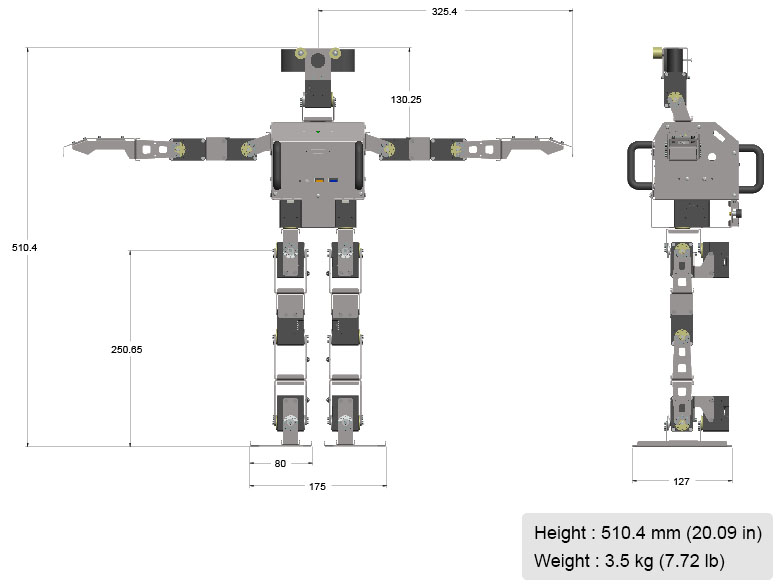
Dimensions and Weight - ROBOTIS OP3
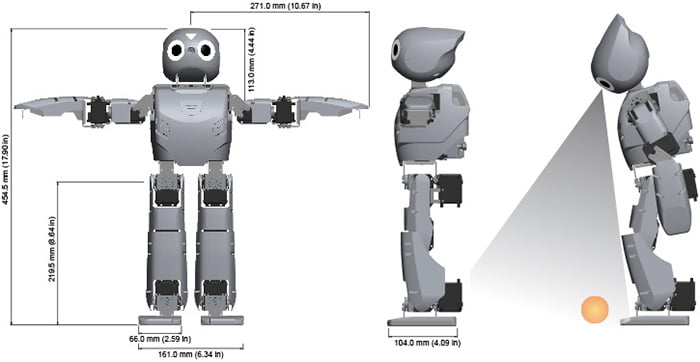
Dimensions and Weight - ROBOTIS OP2
Specification Comparisons
| ROBOTIS OP (discontinued line) | ROBOTIS OP2 | ROBOTIS OP3 | |
| Actuator | MX-28T | MX-28T | XM430-W350 |
| CPU | Intel Atom Z530 @1.6GHz single core | Intel Atom N2600 @1.6GHz dual core | Intel Core i3 processor dual core |
| RAM | 1GB DDR2 (fixed capacity) | 4GB DDR3 204-pin SO-DIMM module (user-replaceable) | 8GB DDR4 SODIMMs 2133MHz (32GB maximum) (user-replaceable) |
| Storage | 4GB NAND flash IDE100 (fixed capacity) | 32GB half-size mSATA module (user-replaceable) | M.2 SSD module (128GB) (user-replaceable) |
| LAN Speed | 100 Mbps | 1 Gbps | 1 Gbps |
| Installable OS | Linux only (32-bit) | any Linux release (32-bit) any Windows release (32-bit) | any Linux release (32-bit/64-bit) any Windows release (32-bit/64-bit) |
| Networking | 802.11g | 802.11n (2.4GHz-only) | Intel 10/100/1000 Mbps Ethernet 802.11ac (2.4GHz, 5GHz) Bluetooth 4.1 |
| Camera | Logitech C905 (1600x1200) | Logitech C905 (1600x1200) | Logitech C920 (1920x1080) |
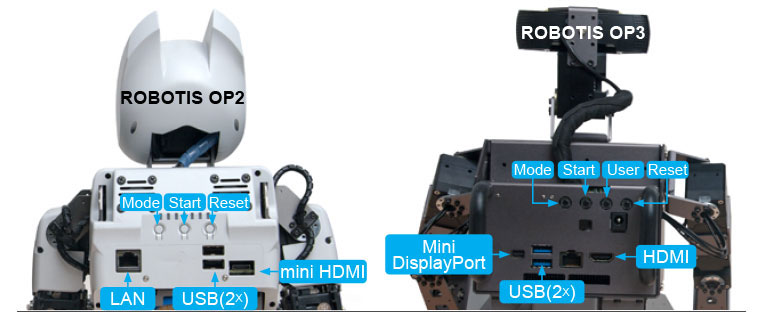
Visual differences
Advantages of ROBOTIS OP3 compared to ROBOTIS OP2
- New Actuators (higher torque)
- Increase of SSD capacity
- Increase of RAM capacity
- Dramatic improvement in computational power
- Replacing Mini HDMI with HDMI
- User friendly sub-controller(CM-730 → OpenCR)
- Improved camera