مقدمه
از نقاط قوت سرووموتورهای هوشمند داینامیکسل، برخورداری از کیت توسعه نرم افزار (SDK) کامل و قدرتمند میباشد. با استفاده از اسدیکی مذکور، میتوان داینامیکسل را به کمک محیط ها و زبان های برنامه نویسی مختلف راه اندازی نمود.
یکی از محیط های برنامه نویسی که در این SDK پشتیبانی شده است متلب (MATLAB) میباشد. متلب در عین سادگی، دارای امکانات متعدد برای علوم و کاربردهای مختلف میباشد و از این رو محبوب دانشگاهیان و دانشجویان میباشد.
نصب MATLAB و DYNAMIXEL SDK
ابتدا نرمافزار MATLAB را بر روی رایانه خود نصب و فعال نمایید.
توجه: توصیه ما نصب نسخههای 2016 به بالاتر متلب میباشد.
سپس DYNAMIXEL SDK را از لینک زیر یا نسخه جدیدتر آن را از گیت هاب ROBOTIS-GIT دانلود کنید:
https://github.com/ROBOTIS-GIT/DynamixelSDK/archive/3.7.31.zip
سپس پوشه آن را از حالت فشرده خارج نمایید و برای استفادههای بعدی در یک مسیر مناسب که از این به بعد آن را مسیر پوشه DynamixelSDK مینامیم، قرار دهید.
حال نرم افزار MATALB را اجرا کنید.
افزودن کتابخانهها به MATLAB
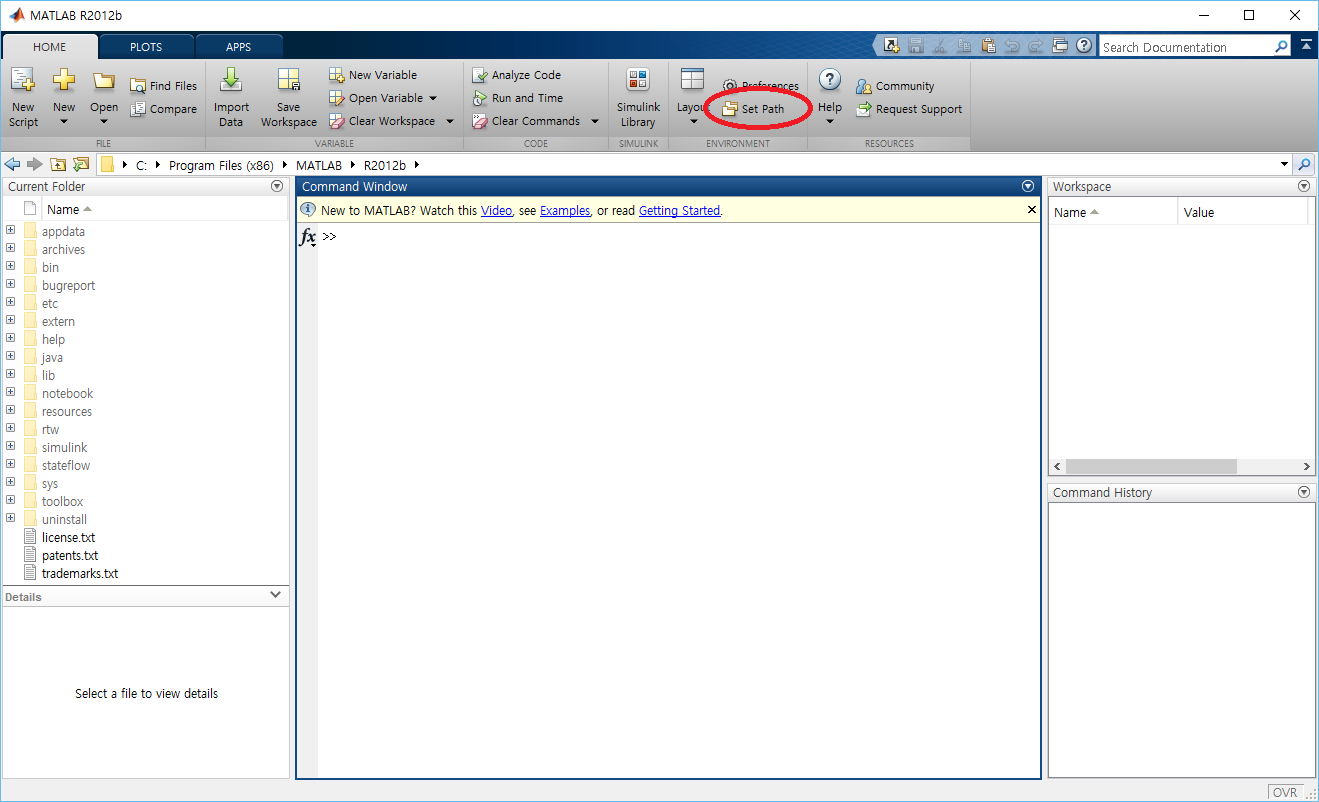
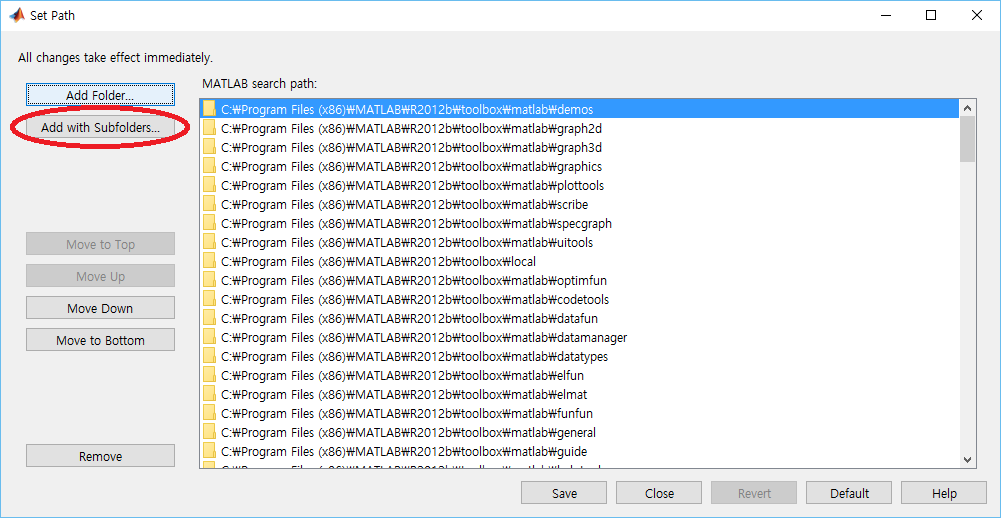
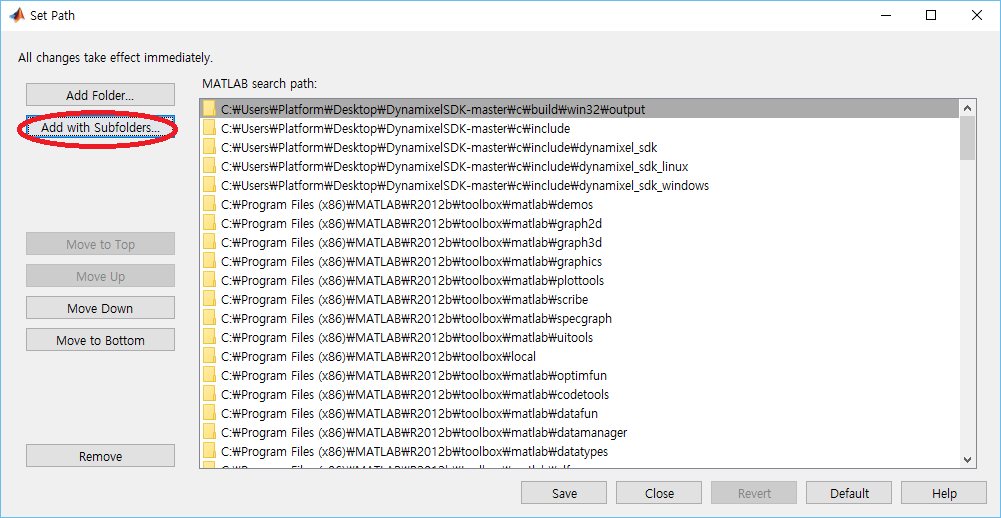
از زبانه HOME، بخش ENVIRONMENT، برروی Set Path کلیک کنید.
روی دکمه … Add with Subfolders کلیک کنید.
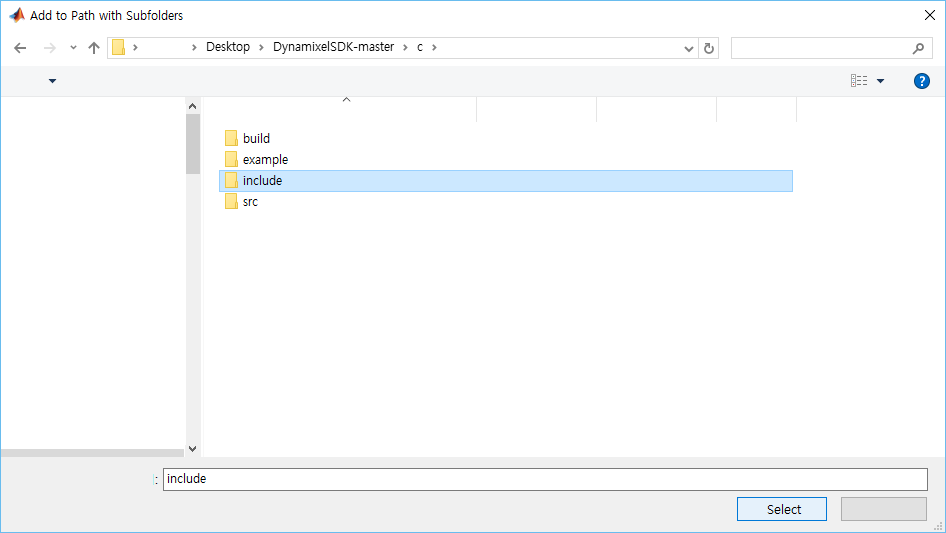
در پنجره باز شده، مسیر پوشه DynamixelSDK، سپس پوشه c و سرانجام پوشه include را انتخاب و برروی Select کلیک کنید تا مجدد به پنجره Set Path بازگردید.
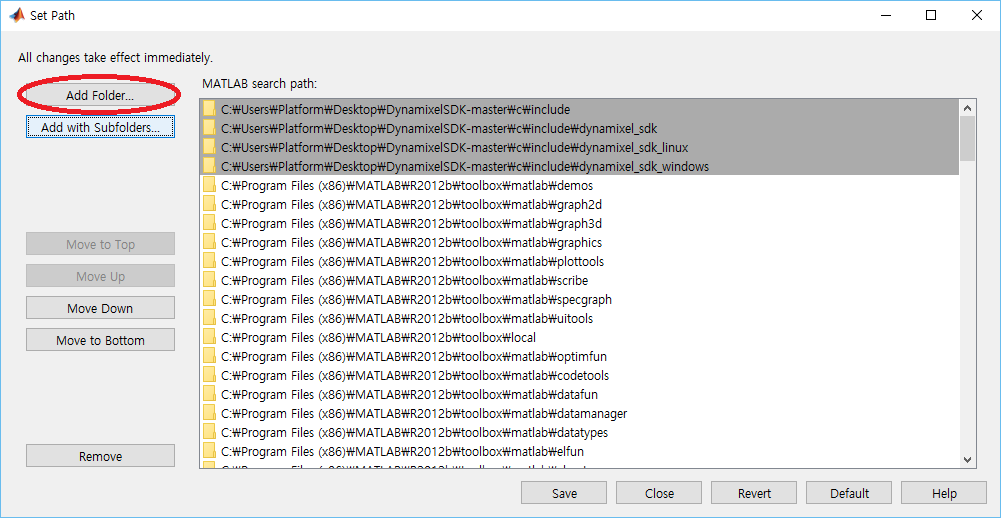
حالا در پنجره Set Path روی … Add Folder کلیک کنید.
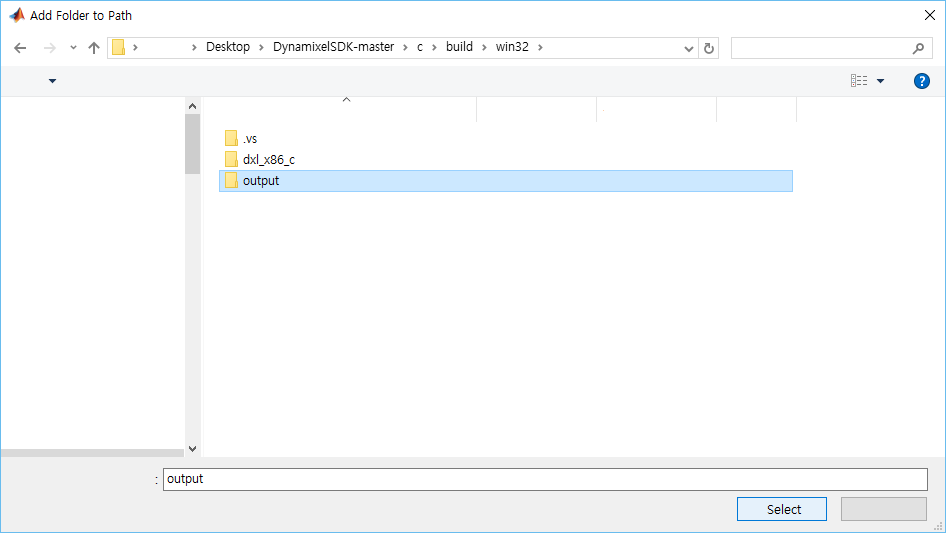
در پنجره باز شده به مسیر پوشه DynamixelSDK بروید و پوشه output را از مسیر DynamixelSDK/c/build/win32 را انتخاب و Select را کلیک کنید.
افزودن مرجع توابع
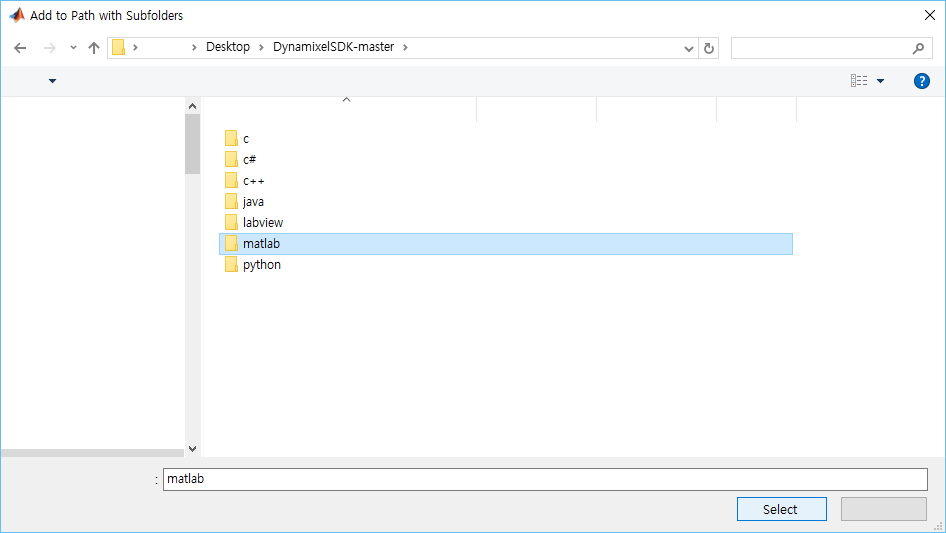
بر روی … Add with Subfolders کلیک کنید.
در پنجره باز شده به مسیر پوشه DynamixelSDK بروید و پوشه matlab را انتخاب و Select را کلیک کنید.
حال بر روی Save و سپس برروی Close کلیک کنید.
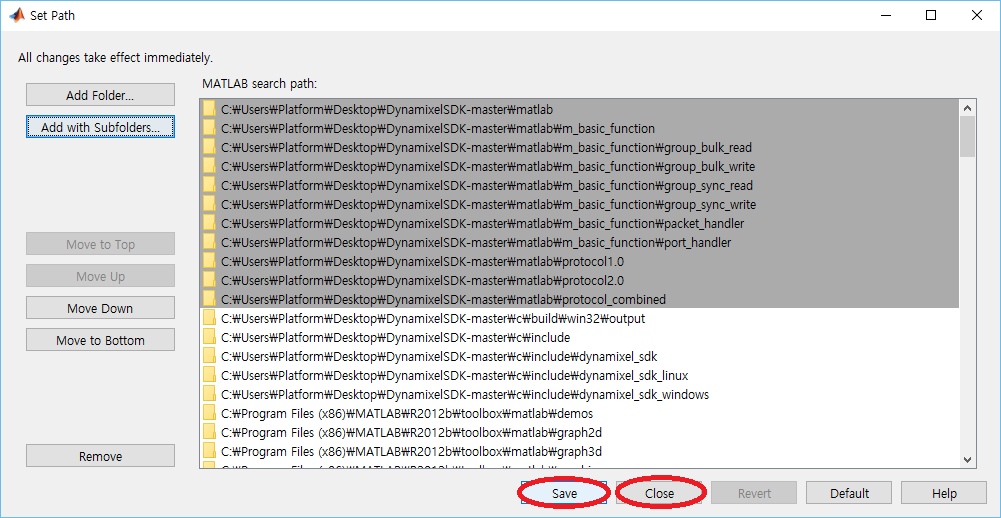
در این مرحله، تنظیم اولیه SDK بر روی متلب با موفقیت به پایان رسید!
اجرای یک نمونه برنامه
برای اجرای یک نمونه برنامه و مشاهده عملکرد مراحل زیر را دنبال کنید:
در نرمافزار MATLAB برروی آیکون Browse for folder کلیک کنید.
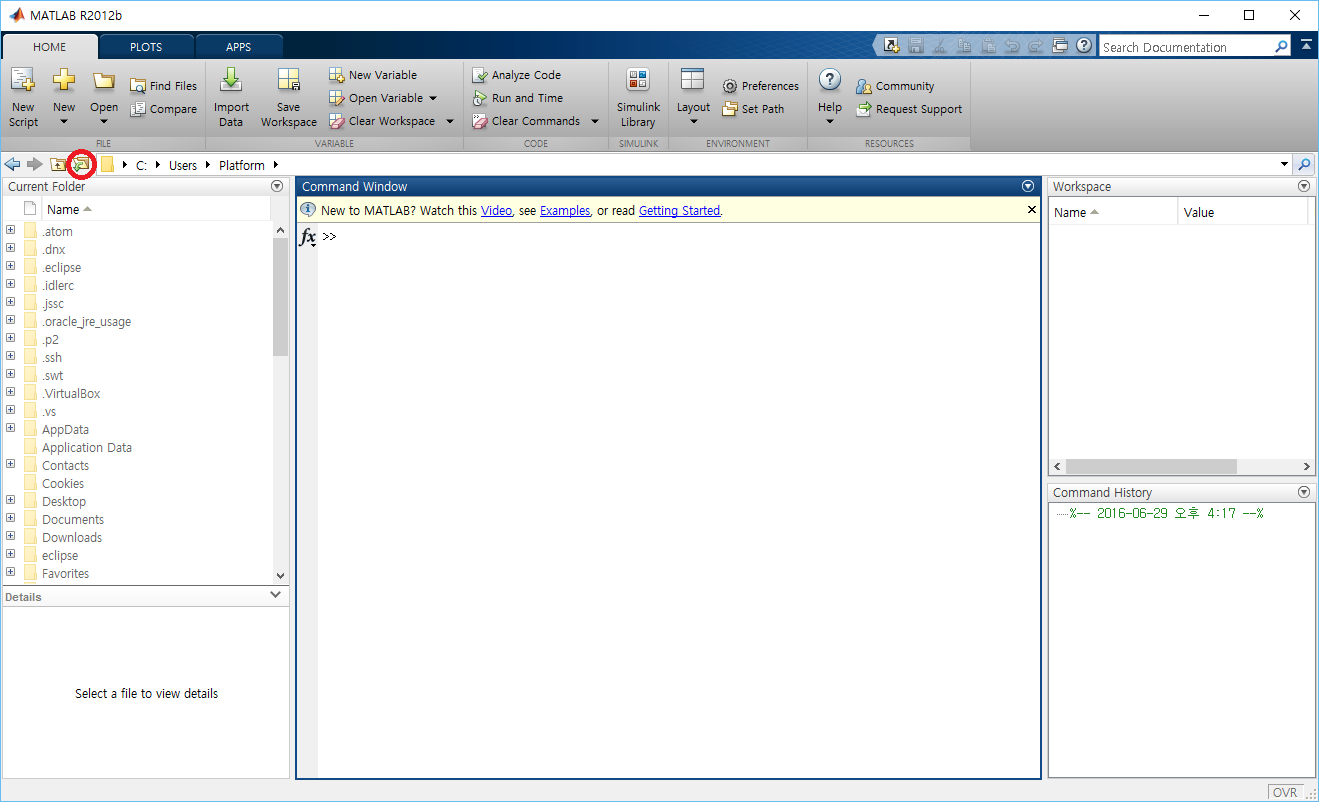
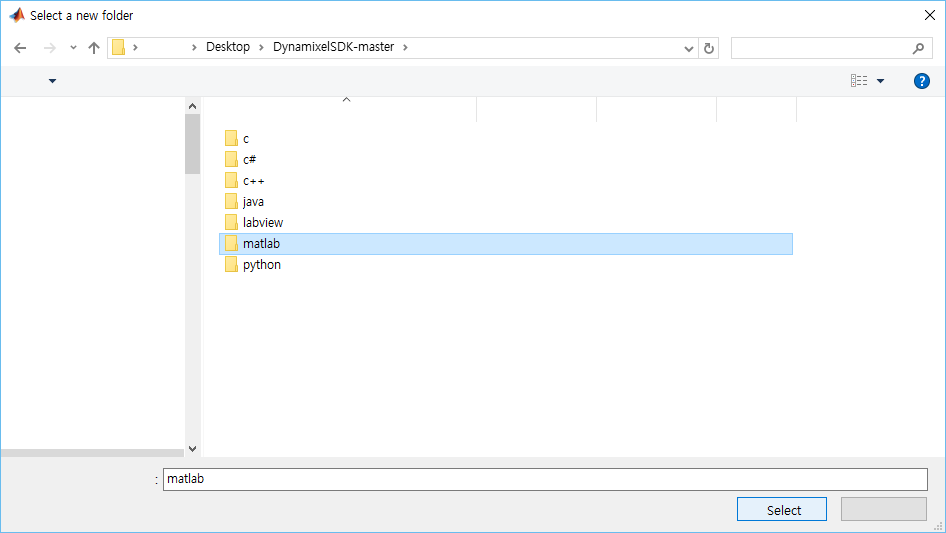
به مسیر پوشه DynamixelSDK بروید و پوشه matlab را انتخاب و Select را کلیک کنید.
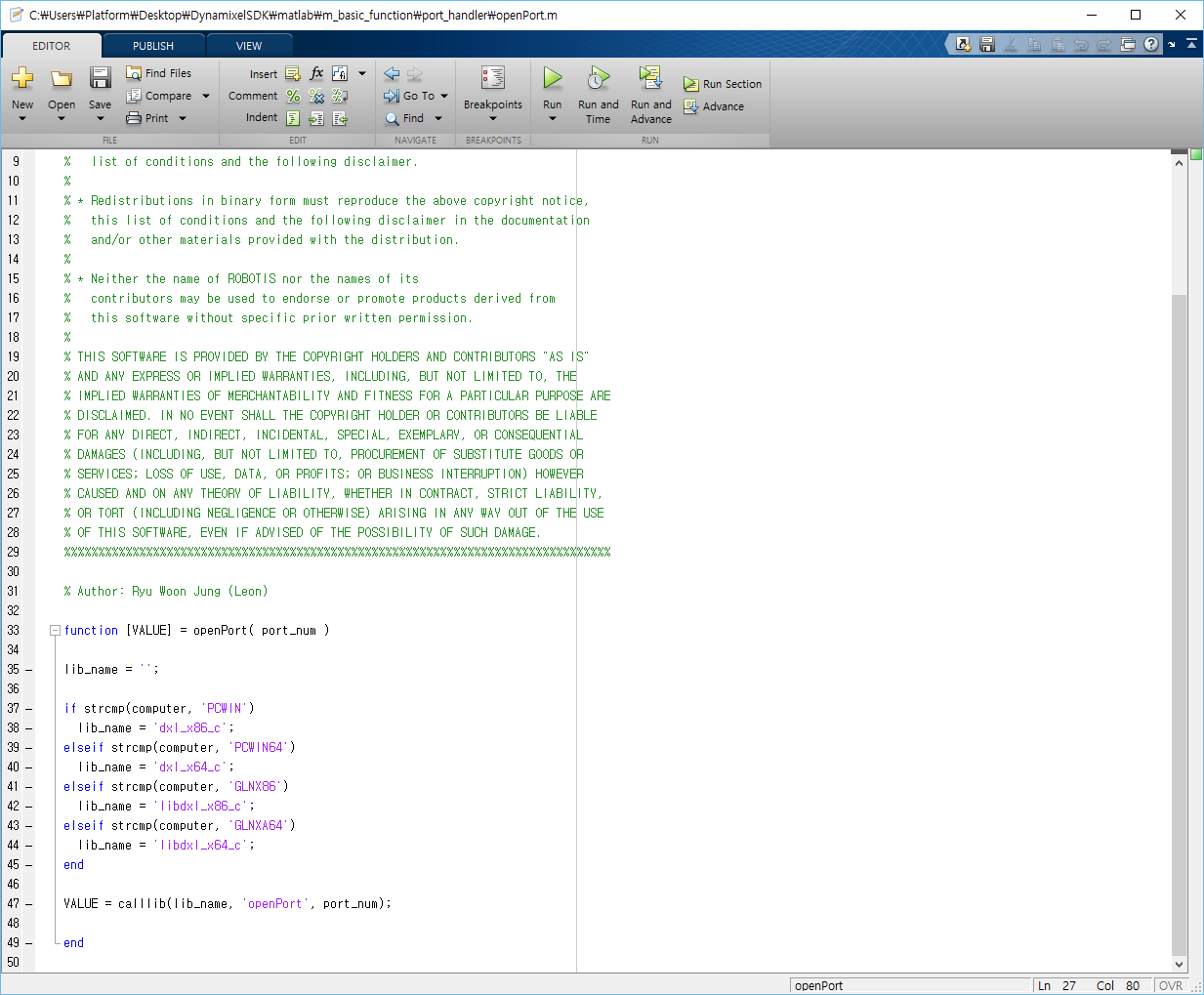
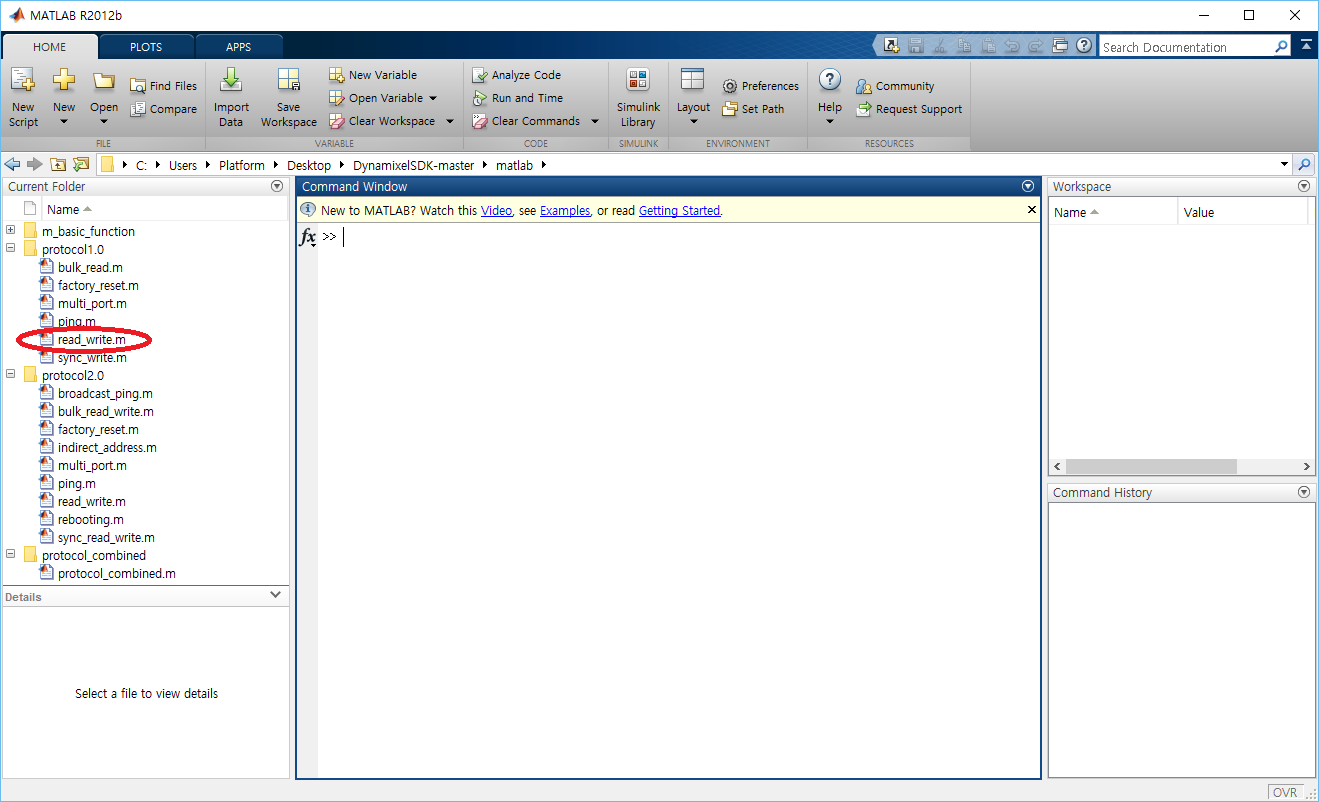
حال در پنجره کناری محیط MATLAB، بسته به پروتکل ارتباطی موتور خود، به یکی از پوشههای protocol1.0 و یا protocol2.0 رفته به دنبال فایل read_write.m بگردید و با کلیک برروی آن، محتویات درونی آن را مشاهده کنید.
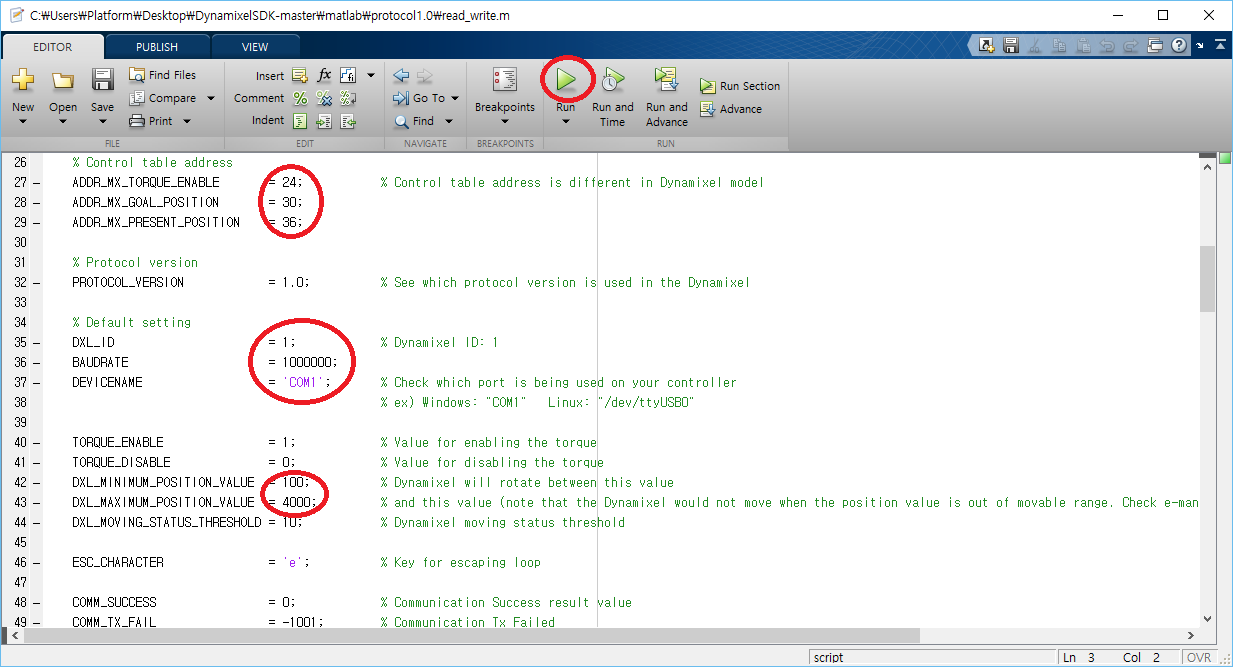
در mفایل باز شده، پارامترهای موتور خود را جایگزین پارامترهای موجود کنید و سپس بر روی Run کلیک کرده در پنجره Console منتظر نتیجه کار بمانید.
توجه: پیش از کلیک بر روی Run، از اتصال داینامیکسل به U2D2 و U2D2 به USB رایانه خود و همچنین فراهم کردن تغذیه مناسب برای داینامیکسل اطمینان حاصل کنید.
درصورتی که همه مراحل را درست پیش رفته باشید، پنجره Console اطلاعاتی مشابه تصویر زیر را برای شما نمایش خواهد داد و داینامیکسل شما حرکت خواهد کرد.
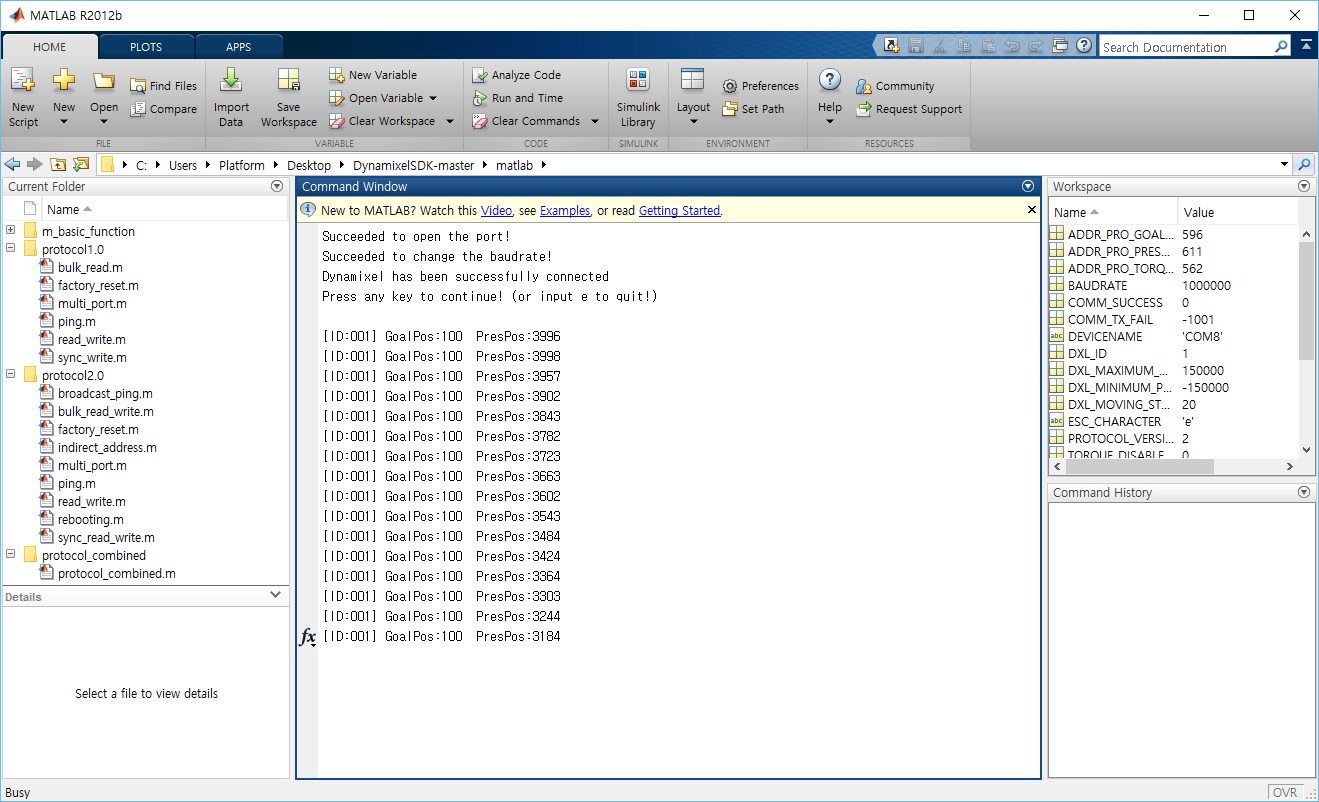
تبریک! شما موفق به راهاندازی موتور داینامیکسل به کمک MATLAB شدید!
حال همه چیز مهیا است تا خودتان دست به کار شوید و ایدههای خودتان را با MATLAB و داینامیکسل پیاده کنید …
تاریخ آخرین بروز رسانی: ۱۴۰۰/۰۲/۲۲



