بازوهای رباتیک پیشروبات
طراحی، تولید، پشتیبانی، آموزش
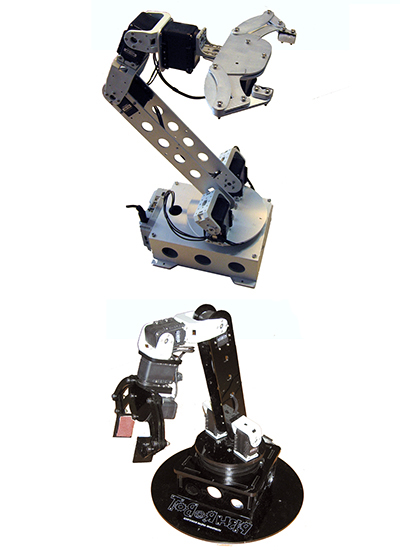
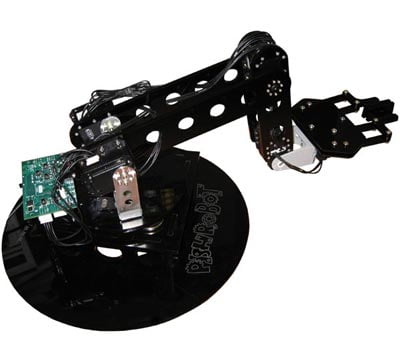
بازوی رباتیک ARM6AX12 که بر اساس سروموتورهای سری AX داینامیکسل طراحی شده است دارای 7 عدد سروموتور و 6 درجه آزادی میباشد. سروموتورهای بازوی ARM6AX12 از نوع DYNAMIXEL AX-12 میباشد.
کنترل این بازو از دو طریق کنترلر قابل برنامهریزی CM-5 یا CM-530 و یا کنترل از طریق کامپیوتر (PC Based Control) با واسط USB2Dynamixel ممکن است و این محصول با کنترلرهای CM-5 یا CM-530 و یا واسط USB2Dynamixel و یا تلفیقی از آنها عرضه میگردد.
با اتصال بازو به کامپیوتر به کمک واسط USB2Dynamixel، میتوان از طریق برنامهها و محیطهای برنامه نویسی مختلف نظیر MATLAB، Python، ROS، Java، Labview، Visual Studio و ... ربات را کنترل نمود.
بدنه ربات، در دو نوع آلومینیومی و پلکسی عرضه میگردد.
حداکثر وزن بار قابل حمل: طبق نمودار روبرو
وزن بازو: 1680 گرم
حداکثر فاصله قابل دسترس افقی: 44.8 سانتیمتر (فاصله مرکز دوران و گریپر در حالت بسته)
فاصله پایه تا محور شانه: 12.1 سانتیمتر
فاصله محور شانه تا محور آرنج: 20.2 سانتیمتر
فاصله محور آرنج تا محور مچ: 16.8 سانتیمتر
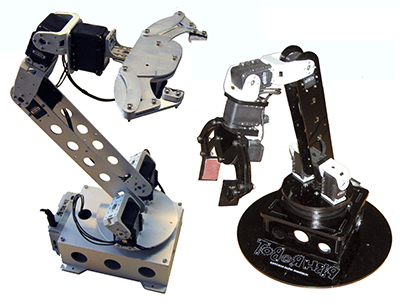
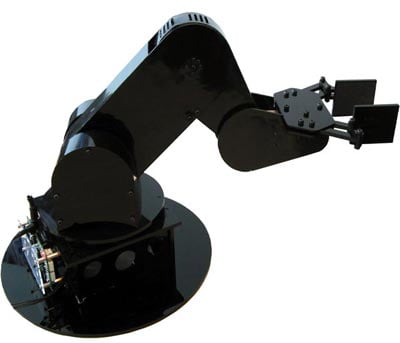
بازوی رباتیک ARM6AX18 شبیه بازوی ARM6AX12 میباشد، با این تفاوت که در آن به جای سروموتورهای DYNAMIXEL AX-12 از سروموتورهای قویتر و سریعتر DYNAMIXEL AX-18A استفاده شده است.
این محصول با کنترلرهایی نظیر CM-5 یا CM-530 یا OpenCM9.04 و یا واسط USB2Dynamixel و یا تلفیقی از آنها عرضه میگردد.
با اتصال بازو به کامپیوتر به کمک واسط USB2Dynamixel، میتوان از طریق برنامهها و محیطهای برنامه نویسی مختلف نظیر MATLAB، Python، ROS، Java، Labview، Visual Studio و ... ربات را کنترل نمود.
بدنه ربات، در دو نوع آلومینیومی و پلکسی عرضه میگردد.
حداکثر وزن بار قابل حمل: طبق نمودار روبرو
وزن بازو: 1690 گرم
حداکثر فاصله قابل دسترس افقی: 44.8 سانتیمتر (فاصله مرکز دوران و گریپر در حالت بسته)
فاصله پایه تا محور شانه: 12.1 سانتیمتر
فاصله محور شانه تا محور آرنج: 20.2 سانتیمتر
فاصله محور آرنج تا محور مچ: 16.8 سانتیمتر

بازوی رباتیک ARMC6MX28 که بر اساس سروموتورهای سری MX داینامیکسل طراحی شده است دارای 6 عدد سروموتور و 6 درجه آزادی میباشد.
کنترل این بازو از دو طریق کنترلر قابل برنامهریزی CM-5 یا CM-530 و یا کنترل از طریق کامپیوتر (PC Based Control) با واسط USB2Dynamixel ممکن است.
این محصول با کنترلرهای CM-5 یا CM-530 و یا واسط USB2Dynamixel و یا تلفیقی از آنها عرضه میگردد.
بدنه مکانیکی ربات، ترکیبی از برکتهای فلزی داینامیکسل و پلکسی میباشد.
توانایی حمل بار به صورت عمودی: تا 6 کیلوگرم
میزان جابجایی در جهت محور عمودی: 55 سانتیمتر
میزان جابجایی در جهت محور افقی: 55 سانتیمتر
حداکثر سرعت: 10 سانتیمتر بر ثانیه

بازوی رباتیک ARMC6MX28V2 نسخهی جدید بازوی ARMC6MX28 میباشد که برای کوچک شدن ابعاد بازو، موتورهای محور عمودی و افقی در کنار هم قرار گرفتهاند.
توانایی حمل بار به صورت عمودی: تا 6 کیلوگرم
میزان جابجایی در جهت محور عمودی: 65 سانتیمتر
میزان جابجایی در جهت محور افقی: 65 سانتیمتر
حداکثر سرعت: 10 سانتیمتر بر ثانیه


بازوی رباتیک ARM5AX12 که بر اساس سروموتورهای سری AX داینامیکسل طراحی شده است دارای 6 عدد سروموتور و 5 درجه آزادی میباشد. سروموتورهای بازوی ARM5AX12 از نوع DYNAMIXEL AX-12 میباشد. کنترل این بازو از دو طریق کنترلر قابل برنامهریزی CM-5 یا CM-530 و یا کنترل از طریق کامپیوتر (PC Based Control) با واسط USB2Dynamixel ممکن است و این محصول با کنترلرهای CM-5 یا CM-530 و یا واسط USB2Dynamixel و یا تلفیقی از آنها عرضه میگردد. بدنه مکانیکی ربات، ترکیبی از برکتهای پلاستیکی داینامیکسل و پلکسی میباشد که نوع آلومینیومی آن نیز به صورت سفارشی قابل تهیه میباشد.

بازوی رباتیک ARM5AX18 شبیه بازوی ARM5AX12 میباشد، با این تفاوت که در آن به جای سروموتورهای DYNAMIXEL AX-12 از سروموتورهای قویتر و سریعتر DYNAMIXEL AX-18A استفاده شده است. این محصول با کنترلرهای CM-5 یا CM-530 و یا واسط USB2Dynamixel و یا تلفیقی از آنها عرضه میگردد.
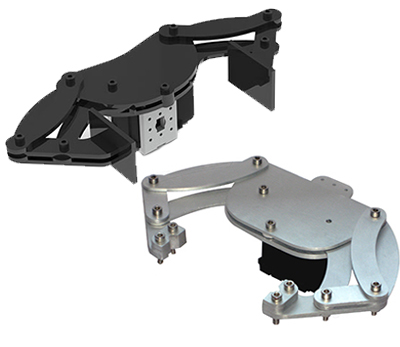
گریپر GRP-AX سازگار با DYNAMIXEL سری AX نظیر AX-12A و AX-18A میباشد. فکهای این گریپر همیشه در حالت موازی با یکدیگر میباشند. از خواص ممتاز این گریپر این است که در حالت باز و بسته طول گریپر تغییر زیادی نمیکند. این گریپر بسیار ساده به بدنه ربات و یا بازوی رباتیک متصل میگردد و در عین حال استحکام بدنه آن بالا میباشد.
جنس بدنه گریپر GRP-AX-AL، از نوع آلومینیوم و گریپر GRP-AX-PL از نوع پلکسی است.
میزان باز شدن فک ها: 10 سانتیمتر
طول گریپر در حالت بسته: 11 سانتیمتر
طول گریپر در حالت کاملاً باز: 8 سانتیمتر
وزن کل گریپر: تقریباً 160 گرم (شامل یک موتور AX-12A)
سازگار با سروموتورهای داینامیکسل AX-12A و AX-18A
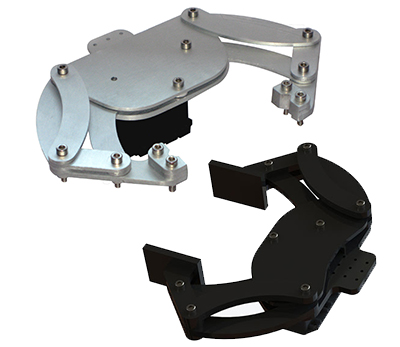
GRP-MX28 یک گریپر بر مبنای سروموتور DYNAMIXEL MX-28 و سروموتورهای هم سایز آن میباشد. فکهای این گریپر همیشه در حالت موازی با یکدیگر میباشند. از خواص ممتاز این گریپر این است که در حالت باز و بسته طول گریپر تغییر زیادی نمیکند. این گریپر بسیار ساده به بدنه ربات و یا بازوی رباتیک متصل میگردد و در عین حال استحکام بدنه آن بالا میباشد.
جنس بدنه گریپر GRP-MX28-AL، از نوع آلومینیوم و گریپر GRP-MX28-PL از نوع پلکسی است.
میزان باز شدن فک ها: 12.5 سانتیمتر
طول گریپر در حالت بسته: 11.1 سانتیمتر
طول گریپر در حالت کاملاً باز: 14.7 سانتیمتر
وزن کل گریپر: تقریباً 193 گرم (شامل یک موتور MX-28)
سازگار با سروموتورهای داینامیکسل RX-10 و RX-24F و RX-28 و MX-28T و MX-28R
اطلاعات متعاقباً تکمیل میگردد ...
اطلاعات متعاقباً تکمیل میگردد ...