معرفی برد EMD22
برد EMD22 یک درایور موتور است که میتواند 2 موتور DC را به صورت مستقل تا جریان مداوم 2 آمپر برای هر موتور، راهاندازی کند. اگر میخواهید از موتورهایی قویتر از موتورهای KAI استفاده نمایید که گشتاور و درنهایت جریان یا ولتاژ بالاتری دارند (مثل موتور فلنج دار پیشروبات)، میتوانید از EMD22 استفاده نمایید. این درایور قابلیت راهاندازی موتور تا ولتاژ 46 ولت و تا جریان 2 آمپر برای دو موتور و جریان 4 آمپر برای یک موتور را در شرایط مساعد دارد. دو حالت کاری برای این برد وجود دارد که با توجه به جریان مصرفی موتور باید یکی از آنها را انتخاب نمایید.
حالت ۱ (پیشفرض)
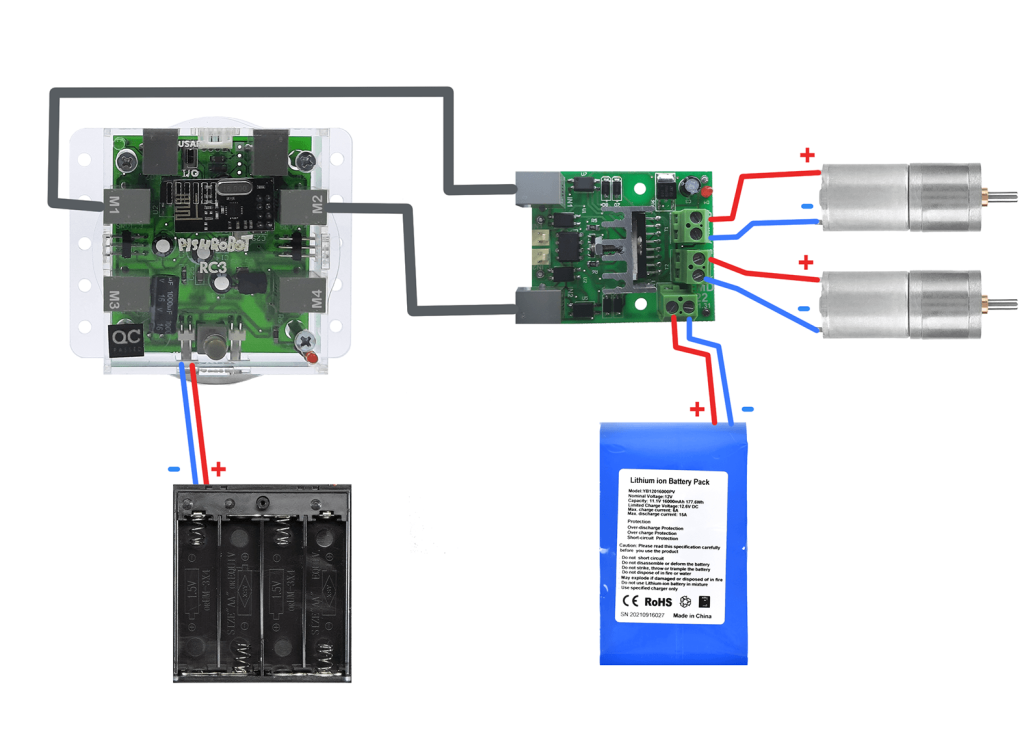
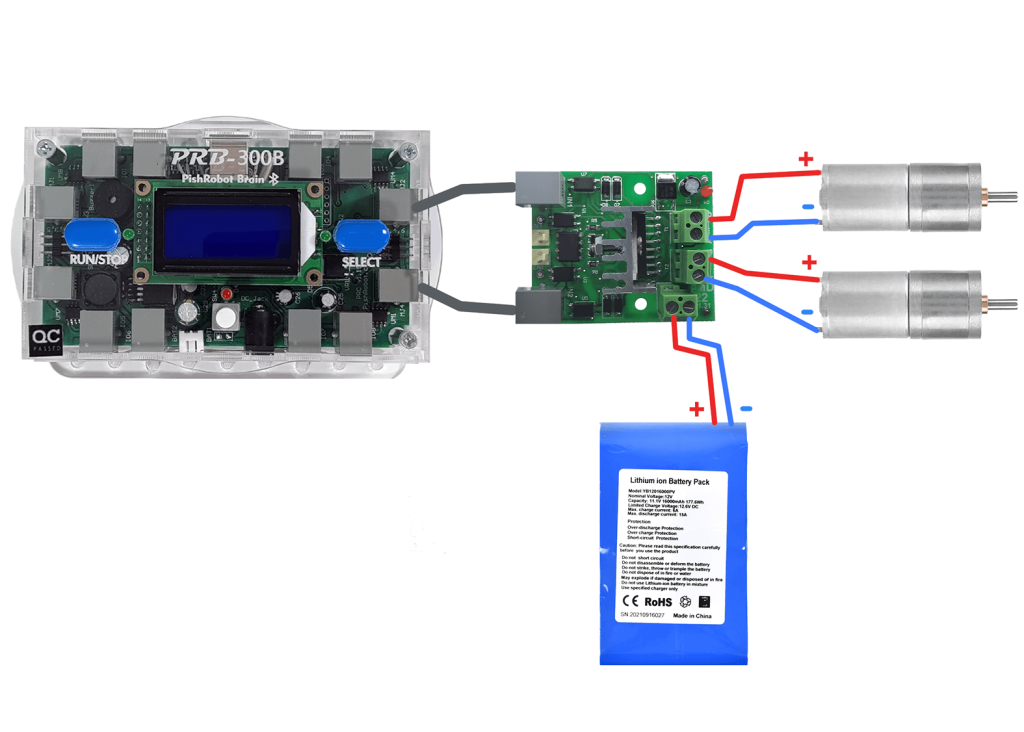
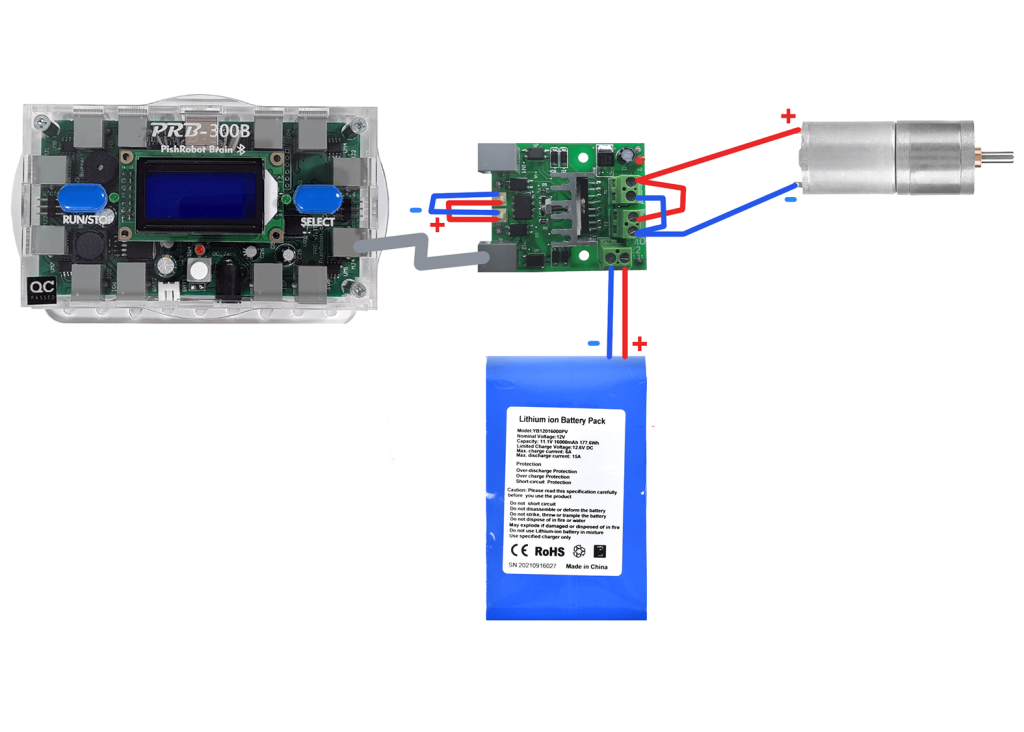
در این حالت شما میتوانید 2 موتور DC را بهصورت مجزا تا جریان 2 آمپر برای هرکدام راهاندازی کنید. برای این منظور کافی است خروجی موتور بردهایی مثل RC3, PRC, Power Pack, Driver1, Driver2 را به ورودی این برد وصل کنید. سپس دو سیم موتور خود را به ترمینالهای تعبیه شده روی برد (به نامهایM1 یا M2) وصل نمایید. حالا باید منبع تغذیه خود را از هر نوعی که باشد (باطری لیتیوم پلیمر یا باطری خشک یا آداپتور و …) به ترمینال BAT وصل نمایید. اگر چراغ قرمز روی برد روشن شود به معنای این است که باطری را به درستی وصل نمودهاید. حالا برد منتظر دستور است. هر وقت دستوری از برد کنترلکننده برای آن فرستاده شود موتور شما را راه میاندازد. به عنوان مثال نحوه اتصال این برد با استفاده از RC3/RC4 و همچنین کنترلر PRB در شکل زیر نشان داده شده است.
اتصال به RC3/RC4
اتصال به PRB
توجه: به جهت وصل نمودن سیمهای باطری به ترمینال BAT توجه کنید. در صورت جابجا وصل کردن سیم مثبت و منفی امکان دارد به برد شما آسیب وارد شود.
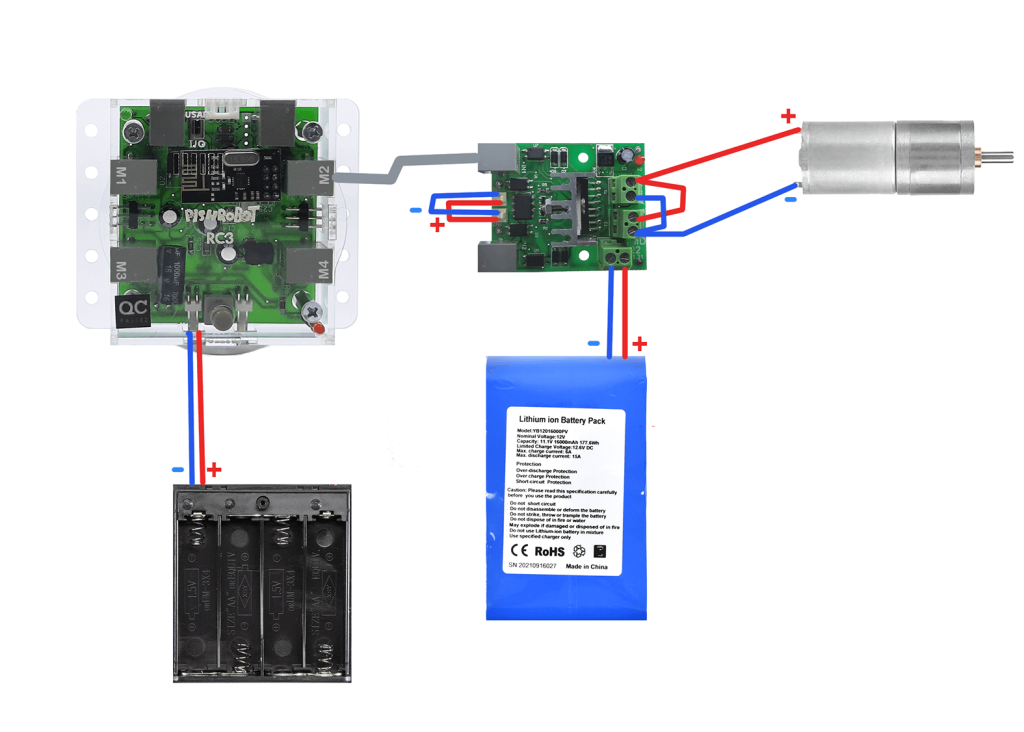
حالت ۲ (جریان بالا)
در این حالت شما میتوانید فقط یک موتور را تا جریان 4 آمپر راهاندازی نمایید به این صورت که ابتدا ورودیهای IN1 و IN2 را توسط سیم قرمز و مشکی به هم وصل نمایید. با این کار شما فرمان ورودی دو موتور را با هم موازی میکنید، سپس یک سیم موتور خود را به خروجی M1A و M2A (بهصورت همزمان) و سیم دیگر موتور را به M1B و M2B وصل نمایید. شما با این کار خروجیهای دو موتور را موازی نمودهاید و حالا باید فقط یک ورودی به برد وصل نمایید(IN1 یا IN2). نحوه سیم بندی در شکل زیر نشان داده شده است.
اتصال به RC3/RC4
اتصال به PRB
توجه: در این حالت بههیچعنوان خروجی M1A را به M2B و یا M1B را به M2A وصل نکنید. چون اتصال کوتاه به وجود میآید و به منبع تغذیه یا برد شما آسیب خواهد رسید.
توجه: در این حالت اگر به هر دو ورودی برد یعنی IN1 و IN2 سیگنال بدهید امکان آسیب دیدن برد وجود خواهد داشت.
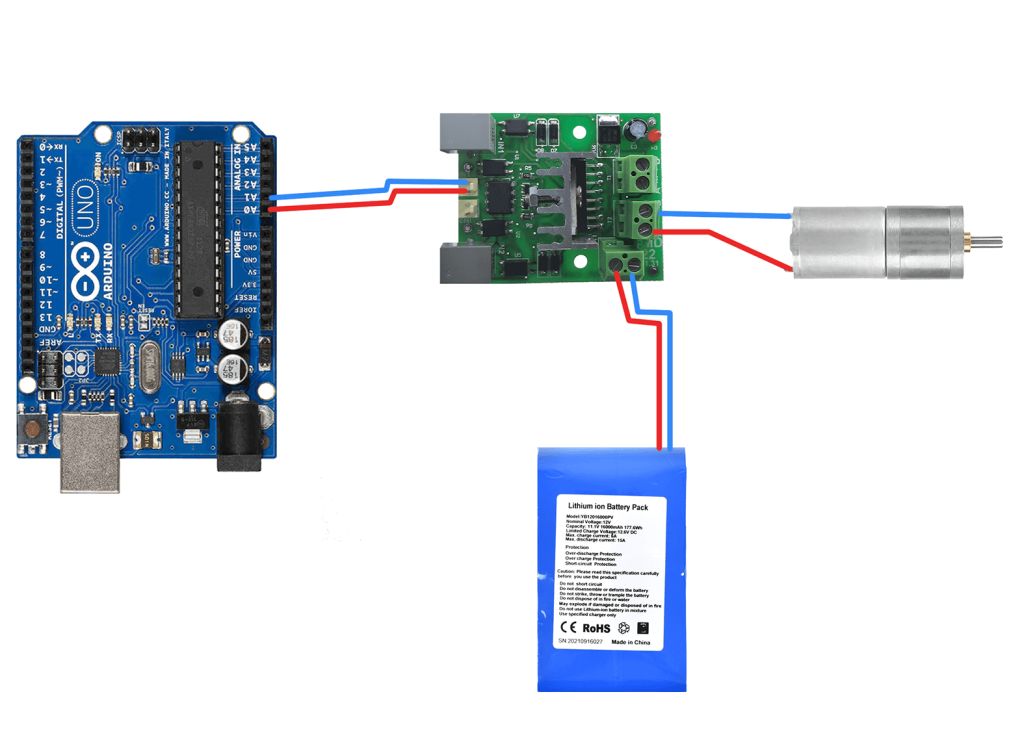
اتصال به Arduino یا Opencm9.04
برای راهاندازی موتور توسط بردهای دیگر نظیر OpenCm-9.04 یا Arduino یا بردهای کنترلی دیگر، کافی است برای هر موتور دو پین کنترلی به برد درایور وصل نمایید (شکل بالا) و طبق جدول زیر به آن دستور دهید:
| Motor Action | Pin2 | Pin1 |
| CW | Low | High |
| CCW | High | Low |
| Stop | Low | Low |
| Stop | High | High |
تاریخ آخرین بروز رسانی: ۱۴۰۱/۰۸/۰۸



